Download
1 / 21
220 likes | 339 Views
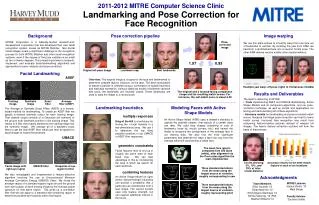
Shape Modeling. Vladimir Savchenko vsavchen@k.hosei.ac.jp. Course Details. Course materials can be downloaded from http://cis.k.hosei.ac.jp/~vsavchen/SML/ Evaluation: Attendance - 20 Projects - 50 Exam - 30 Almost all lectures have exercises. Do them!

E N D
Shape Modeling Vladimir Savchenko vsavchen@k.hosei.ac.jp
Course Details • Course materials can be downloaded from http://cis.k.hosei.ac.jp/~vsavchen/SML/ • Evaluation: • Attendance - 20 • Projects - 50 • Exam - 30 • Almost all lectures have exercises. Do them! • Some of them will be used during exams!!!
Preface • What is CAGD and CG ? • An attempt to abstract from the complexity of phenomena
Examples • Global reconstruction from point sets ( Head and Shell reconstruction)
Examples - Surface Retouching (Cont.) • Surface retouching of a real polygonal model • Left image. A “Stoned” model (courtesy of R. Scopigno and M. Calliery of Institute CNUCE). Model size – 88478 points. • Right after surface retouching.
Examples- Surface Smoothing with CSRBFs (Cont.) • Comparison of CSRBF smoothing and Laplacian smoothing. (a) (b) • (a) Original noisy sphere “Epcot” model, (770 vertices, 1536 polygons); (b) Smoothed model after 5 iterations based on 11-point interpolation. Processing time: 0.6 s. 200 iterations, 0.1 s. 1000 iterations, 0.41 s. • Noisy sphere “Epcot” model after processing with Laplacian smoothing
Examples- Surface Smoothing with CSRBFs (Cont.) (a) The original “Stanford Bunny” model (35947 vertices) (b) Smoothed model after one iteration based on 11 points interpolation (processing time 4.7 sec) (c) Smoothed model after one iteration based on 5 points interpolation (d) Smoothed model after 5 iterations based on 5 points interpolation
Examples- Surface Smoothing with CSRBFs (Cont.) (a) The original “ballJoint” model (Cyberware Inc, 34267 vertices) (b) Smoothed model after one iteration based on 11 points interpolation (processing time 4.1 sec)
Examples - Surface Simplification with RBFs (Cont.) • Visual results for the Horse model (a) - 96966 polygons (b) - 50% (c) - 30% (d) - 10% (e) - 3%
Examples - Surface Simplification with RBFs (Cont.) (a)The modified “Stanford Bunny” model, simplified according to the Hoppe algorithm (30% of original data, processing time - 158.989 sec), (b) Simplified model (30%) by using simple geometric error metric (c) Simplified model according to our approach (30%, processing time - 59.737 sec) (a) (b)(c)
Animation with CSRBFs • The space mapping technique is applied in 3D space and can serve for computing of surface transformations according to the user demands • The left image shows the “Lion-dog” model (courtesy of Yutaka Ohtake and A Belyev of Max-Planck-Institut für Informatik) (24930 vertices, 50000 polygons), whose surface was generated from range data • The right image shows plausible deformations after applying space deformations by two 3D points (the time required to calculate deformations is about 0.0001 seconds)
Example of global reconstruction. Pattern dependent reconstruction contour maps • Existing contour maps are still a rich source of data for the description of terrain surfaces • Provide reconstruction of scattered data • Main techniques: • FEM as a numerical approach to reconstruction of scattered data • Fractal-based surface erosion to mimic appearance of natural terrain surfaces
Example of global reconstruction. Pattern dependent reconstruction contour maps (Cont.) • Approximation of fractalized surface (17 contour lines), a = 0.1. • Approximation of fractalized surface (255 contour lines),a= 0.1.
Local reconstruction • Implementation of the partition of unity for generation of polygons from scattered data of (the fragment of Mount Bandai): (a) a curvature analysis. Blue area – the surface variation > 0.3; • (b) result of reconstruction (ray tracing). Number of scattered points - 10000, number of vertices after reconstruction – 90000, processing time – 0.941 sec; • (c) fragment of the mesh as a wire-frame with color attributes in accordance with calculated heights
Examples of shape triangulations by the use of particles • (a) The “Head” model, implicit function constructed by CSRBFs, and a final distribution of particles • (b) Polygonization of “Head” model using final distribution of particles (1487 points) • (a) Incomplete polygonization of the “Seashell” model, obtained by using Bloomenthal’s algorithm • (b) Complete polygonization, obtained by using particle system
Example – Local reconstruction (cont.) • Surface reconstruction of a technical data set: (a) cloud of points, 4100 scattered points are used (b) simplified mesh shaded (c) a fragment of the mesh as wire-frame, 7141 vertices (a)(b) (c)
Improvement of mesh quality • If a mesh is created for FEM applications, it is very important to control the mesh gradation smoothness. Shape elements have a strong influence on discretization errors (a) (b) • Fragment of an initial mesh (“Horse” model) • After improvement
GUI and haptic visualization (Cont.) • Engraving operations with haptic feedback • The main problem is to provide a system response with the speed 0.003 sec. • Remarks • The virtual environment even with a haptic feedback does not provide a feeling of depth • Decartes`s dualism (1664) :The intention comes from the soul and is used in combination with the information provided by the senses to determine the proper bodily movement • The second and possibly the greatest problem is that visual appearance or result of applying cutting operations depends on lighting or observer position