Download
1 / 1
10 likes | 212 Views
Speed Control. Micro Controller. SBC. serial. serial. Servo. Compass. 4. CMUcam2. IR Sensor. Messaging Server. פרויקט ה-"אח הגדול" פיתוח רכב אוטונומי המבצע משימות תנועה קובי (יעקב) גנה אדם כפיר מנחה : ד"ר ראובן גרנות. אוניברסיטת בר – אילן ביה"ס להנדסה המעבדה להנדסת מחשבים

E N D
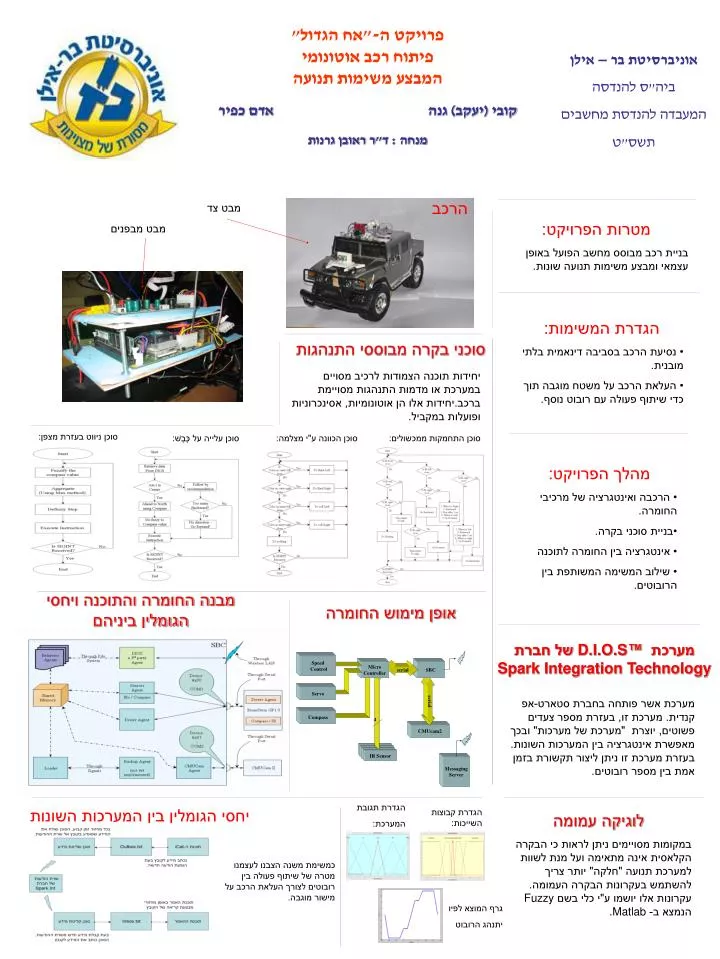
Speed Control Micro Controller SBC serial serial Servo Compass 4 CMUcam2 IR Sensor Messaging Server פרויקט ה-"אח הגדול"פיתוח רכב אוטונומיהמבצע משימות תנועהקובי (יעקב) גנה אדם כפירמנחה : ד"ר ראובן גרנות אוניברסיטת בר – אילן ביה"ס להנדסה המעבדה להנדסת מחשבים תשס"ט הרכב מבט צד מטרות הפרויקט: בניית רכב מבוסס מחשב הפועל באופן עצמאי ומבצע משימות תנועה שונות. מבט מבפנים • הגדרת המשימות: • נסיעת הרכב בסביבה דינאמית בלתי מובנית. • העלאת הרכב על משטח מוגבה תוך כדי שיתוף פעולה עם רובוט נוסף. סוכני בקרה מבוססי התנהגות יחידות תוכנה הצמודות לרכיב מסויים במערכת או מדמות התנהגות מסויימת ברכב.יחידות אלו הן אוטונומיות, אסינכרוניות ופועלות במקביל. סוכן ניווט בעזרת מצפן: סוכן עלייה על כֶּבֶשׁ: סוכן הכוונה ע"י מצלמה: סוכן התחמקות ממכשולים: • מהלך הפרויקט: • הרכבה ואינטגרציה של מרכיבי החומרה. • בניית סוכני בקרה. • אינטגרציה בין החומרה לתוכנה • שילוב המשימה המשותפת בין הרובוטים. מבנה החומרה והתוכנה ויחסי הגומלין ביניהם אופן מימוש החומרה מערכת D.I.O.S™ של חברת Spark Integration Technology מערכת אשר פותחה בחברת סטארט-אפ קנדית. מערכת זו, בעזרת מספר צעדים פשוטים, יוצרת "מערכת של מערכות" ובכך מאפשרת אינטגרציה בין המערכות השונות. בעזרת מערכת זו ניתן ליצור תקשורת בזמן אמת בין מספר רובוטים. הגדרת תגובת המערכת: יחסי הגומלין בין המערכות השונות הגדרת קבוצות השייכות: לוגיקה עמומה במקומות מסויימים ניתן לראות כי הבקרה הקלאסית אינה מתאימה ועל מנת לשוות למערכת תנועה "חלקה" יותר צריך להשתמש בעקרונות הבקרה העמומה. עקרונות אלו יושמו ע"י כלי בשם Fuzzy הנמצא ב- Matlab. כמשימת משנה הצבנו לעצמנו מטרה של שיתוף פעולה בין רובוטים לצורך העלאת הרכב על מישור מוגבה. גרף המוצא לפיו יתנהג הרובוט
