Download
1 / 24
260 likes | 333 Views
This study by Dominique Léger, Françoise Viallefont, Philippe Déliot, and Christophe Valorge explores the assessment of SPOT cameras to verify requirements, compare in-flight and ground measurements, and adjust filters. It includes the overview of SPOT family cameras, refocusing methods, and relative and absolute MTF measurement techniques. The research delves into the techniques used for refocusing SPOT cameras, with a focus on adjusting the best mean position for optimal performance. The study also includes various MTF measurement methods, from visual assessment to point source measurements, to ensure accurate evaluation of the cameras' performance. The accuracy of these measurements is crucial for maintaining the quality of satellite imagery.

E N D
On-orbit MTF assessment of satellite cameras Dominique Léger (ONERA) Françoise Viallefont (ONERA) Philippe Déliot (ONERA) Christophe Valorge (CNES)
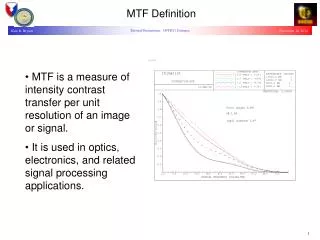
Introduction • Objective • assessment of SPOT camera MTF • to verify cameras requirements • to compare in-flight and ground measurements • to obtain accurate values to adjust deconvolution filters (SPOT5 THR) • Need to focus camera before MTF assessment • due to possible slight defocus • vibrations during launch • transition from air to vacuum
SPOT family Overview • SPOT1,2,3 • HRV cameras • Pa (10m) B1, B2, B3 (20m) • SPOT4 • HRVIR cameras • M (10m) B1, B2, B3, B4 (20m) • Vegetation camera • B0, B2, B3, B4(1km) • SPOT5 • HRG cameras • HM (5m) B1, B2, B3 (10m), B4 (20m) • THR (2,5m) • HRS cameras (10 m) • Vegetation camera • B0, B2, B3, B4 (1km) SPOT5 SPOT4 SPOT2
Refocusing SPOT cameras • Method • Both cameras image the same landscape • One is used as a reference • Focusing mechanism of the other is moved • Calculation of the ratio of image spectra • integration in band 0.25 fs - 0.35 fs • calculations in row and column directions • result is a function of position p of mechanism • The curve looks like a parabola • a defocus model is fitted on measurements • the vertex gives the best focus • Calculations vs field area • center and edges (SPOT5)
Refocusing SPOT cameras • Refocusing operation sequence (SPOT5 HRG) • Before launch, the cameras are set on best vacuum mean focus p0 • First stage: slight defocusing around p0 • p0-8, p0+8, p0 (~±10 mm) • mechanism validation • first focus estimation p1 • Second stage: sufficient defocusing to overpass p1 • Final estimation of best focus • row-wise and columnwise astigmatism • field center and field edges • Setting the focus to best mean position
Refocusing SPOT cameras • Results of HRG1 refocusing operations (First stage) • Vertex outside measurement points • Second stage needed
Refocusing SPOT cameras • Results of HRG1 refocusing operations (second stage) • Best focus (field center): p0-13 • Astigmatism: -7 (one focusing step = 1.2 mm)
Refocusing SPOT cameras • Best focus and astigmatism vs field area (with respect to p0) • Final focusing • HRG1: p0-12 • HRG2: p0-7
Relative MTF measurement method • Both cameras image the same landscape (with and without shift) • Landscapes with a large frequency content (e.g. big cities) • Three kind of imaging 1 HRG1 HRG2 2 HRG1 HRG2 3 HRG1 HRG2 1 Frequency content comparison between homologous areas • Field centers, field edges 1+ 2 (3) Frequency content comparison in the field of one instrument • e.g. 1+2 HRG1 left edge versus HRG1 center L C R
Absolute MTF measurement methods • Overview of methods from SPOT1 to SPOT5 • Visual assessment • HRV cameras SPOT1, SPOT2, SPOT3 • Point source method • SPOT3, SPOT4, SPOT5 • Step edge method • Natural target SPOT4 HRVIR & SPOT5 HRS • Artificial target SPOT5 HRG • Bi-resolution • SPOT4 HRVIR (vs airborne) SPOT4 VGT (vs HRVIR) • Periodic target • SPOT5 HRG
MTF measurement methods: Visual assessment • SPOT1, SPOT2, SPOT3 HRV cameras • Only panchromatic band • Aerial imagery of urban sites • 20 sites chosen in the south of France • Simulation of the corresponding satellite imagery • For each site, images with decreasing MTF are simulated • The whole set of images is called MTF catalog • In-flight, visual comparison of actual and simulated images • MTF of the catalog image nearest to the actual image gives a rough assessment of the in-flight MTF
MTF measurement methods: Point source • SPOT3 HRV, SPOT4 HRVIR, SPOT5 HRG • Pa and XS bands • Image of a spotlight aimed at the satellite • In SPOT5 THR mode, the PSF is sufficiently sampled • MTF is obtained by Fourier transform of the PSF • In other modes, two ways to overcome PSF undersampling • To use a MTF model • To combine several images to rebuild sufficiently sampled image • or to use several spotlights
MTF measurement methods: Point source • Unique point source method • Integrating point image (row-wise or columnwise) • 1D problem • Reference LSF = FT(parametric 1D MTF model) • Two parameters: MTF and phase (versus sampling grid) • Matching LSF samples with reference Value of the MTF parameter • Corresponding MTF = 1D in-flight MTF Value of the phase parameter • Stability of MTF • Possibility to mix the various sets of LSF samples • If different phase parameters
MTF measurement methods: Point source • Two point source method • Simplified version of point source array • Integrating point image (row-wise or columnwise) • 1D problem • Hypothesis MTF is negligible beyond frequency sampling Two points are sufficient • Experiment with two spotlights (SPOT5)
MTF measurement methods: Point source Spotlights on a grassy uniform area Xe lamp: 3kW Xe lamp: 1kW
MTF measurement methods: step edge • Step edge method • Image of a target (artificial or natural) with a sharp transition between dark and bright area • With a slight edge inclination, we can interleave successive rows (or columns) to rebuild a sufficiently sampled response to Heaviside function • Again, this is not necessary with THR mode • Modulusof ratio of FT (edge response) to FT (edge) = in-flight MTF • Two kinds of edge • Natural edge: agricultural fields • Difficulty to find a good one and to validate it • Artificial edge • A checkerboard target has been laid out (Salon-de-Provence in south of France) • 60 x 60 m
MTF measurement methods: Natural step edge • Fields near Phoenix (SPOT5 HRS2 10/06/02) • Example of an almost horizontal edge • along the track measurement
MTF measurement methods: Natural step edge Example of result with HRS • Method improvement: MTF model is fitted on MTF curve
MTF measurement methods: Artificial edge target • Salon-de-Provence target (SPOT5 HRG1 26/07/02)
MTF measurement methods: Bi-resolution • Principle • Same landscape acquired with two spatial resolutions (same spectral band) • High resolution image = reference • Low resolution image = sensor under assessment • In-flight MTF = Modulus of ratio of FT (LR image) to FT (HR image) • Two situations • Satellite image versus aerial image • Attempt with SPOT4 HRVIR • Both sensors on the same satellite • Attempt with SPOT4: VGT1 versus HRVIR
MTF measurement methods: Periodic target • Opportunity to acquire Stennis Space Center radial target with SPOT5 HM (5m) THR (2.5m)
MTF measurement methods: Comparison • Comparison of SPOT5 HRG1 MTF measurements • Direction Rows Columns Diagonal • Spotlight 0.35 0.32 0.15 • Step edge 0.33 0.30 • Radial target 0.38 0.18 • Ground 0.31 0.36 • Specification 0.25 0.23 • Close results for different methods • In-flight and ground measurements similar and better than specification
MTF measurement : Comments on best methods • Artificial step edge • Well suited to high-resolution satellites (GSD < 5 m Salon-de-Provence target) • Target building and maintenance expensive • Only two measurement directions • Spotlight • Suitable to GSD up to 30m • No orientation constraint • Needs a team on ground • Bi-resolution • Attractive with different GSD cameras aboard the same satellite • Radial target • Interest of visual assessment in addition to MTF measurements • No orientation constraint • Target building and maintenance expensive