Download
1 / 2
20 likes | 169 Views
动态误差. 前面讲的是静态误差,是一个静态值 即当 t→∞ 时系统误差的极限值 E(S) 逆变换,是一个时间的函数 时间在 t→∞ 是一个有限的变化过程 实际控制系统的稳态误差往往表现为时间的函数, ----- 即动态误差。. 例:如图系统: 其误差传递函数为: Φxi(s)= E(s)/ Xi(s)=1/[1+G(s)H(s)]. 依据终值定理,时间 t→∞ 对应于 S=0 将上式在 S=0 处展开成泰勒级数形式: Φxi(s)= E(s)/ Xi(s)=1/k 0 +1/k 1 • s+1/k 2 • s2+ …

E N D
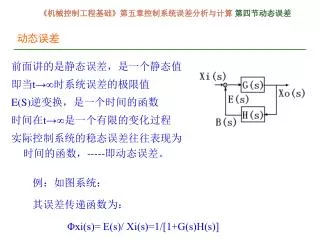
动态误差 前面讲的是静态误差,是一个静态值 即当t→∞时系统误差的极限值 E(S)逆变换,是一个时间的函数 时间在t→∞是一个有限的变化过程 实际控制系统的稳态误差往往表现为时间的函数,-----即动态误差。 例:如图系统: 其误差传递函数为: Φxi(s)= E(s)/ Xi(s)=1/[1+G(s)H(s)]
依据终值定理,时间t→∞对应于S=0 将上式在S=0处展开成泰勒级数形式: Φxi(s)= E(s)/ Xi(s)=1/k0+1/k1•s+1/k2•s2+… 式中ki=1/i! •d(i)Φxi(s)/ds(i)] s=0 k0,k1,k2,…---动态误差系数 E(s)= 1/k0 Xi(s)+1/k1•s Xi(s) +1/k2•s2 Xi(s) +… 此级数的收敛域是S=0的邻域。 则当初始条件为零时,求拉氏逆变换。 ε(t) = 1/k0 Xi(t)+1/k1•d Xi(t)/dt +1/k2•d2Xi(t)/dt2 +… 动态误差与静态误差的关系: εss=limε(t)
