Download
1 / 1
20 likes | 197 Views
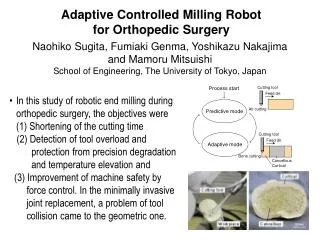
Adaptive Controlled Milling Robot for Orthopedic Surgery. Naohiko Sugita, Fumiaki Genma, Yoshikazu Nakajima and Mamoru Mitsuishi School of Engineering , The University of Tokyo, Japan.

E N D
Adaptive Controlled Milling Robot for Orthopedic Surgery Naohiko Sugita, Fumiaki Genma, Yoshikazu Nakajima and Mamoru MitsuishiSchool of Engineering, The University of Tokyo, Japan • In this study of robotic end milling during orthopedic surgery, the objectives were (1) Shortening of the cutting time • (2) Detection of tool overload and • protection from precision degradation • and temperature elevation and • (3) Improvement of machine safety by • force control. In the minimally invasive • joint replacement, a problem of tool • collision came to the geometric one.