Download
1 / 54
540 likes | 611 Views
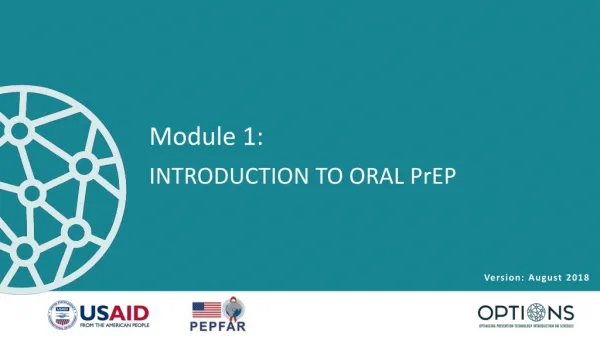
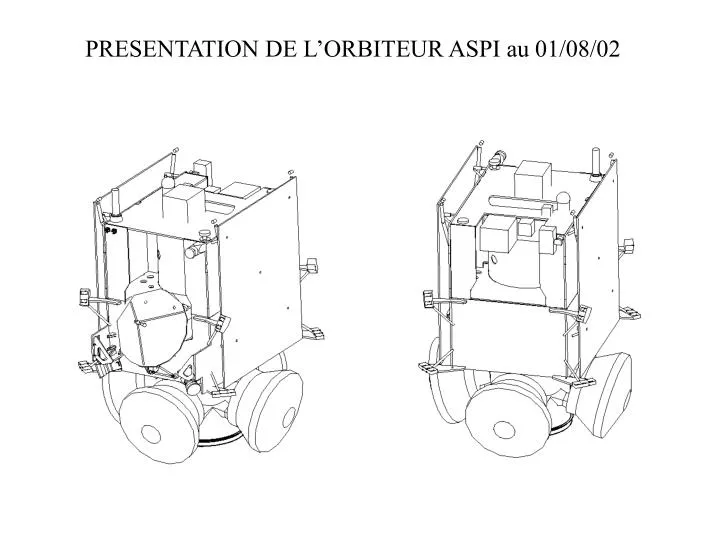
PRESENTATION DE L’ORBITEUR ASPI au 01/08/02. PRESENTATION DE L’ORBITEUR ASPI au 01/08/02. PRESENTATION DE L’ORBITEUR ASPI au 01/08/02. Wide angle caméra. OS. Narrow angle caméra. Antenne bande X (LGA). Antenne NEIGE. OS. LIDAR. Antenne UHF. Antenne UHF. SAS. Antenne HGA.

E N D
PRESENTATION DE L’ORBITEUR ASPI au 01/08/02 Wide angle caméra OS Narrow angle caméra Antenne bande X (LGA) Antenne NEIGE OS LIDAR Antenne UHF Antenne UHF SAS Antenne HGA Antenne bande X (LGA) Environnement instrument 2 (DYNAMO) Star tracker GALILEO NET LANDER Environnement instrument 1 (MAMBO)
LOT 1
LOT 2
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 1 DYNAMO C + DYNAMO 2 + NIRGAL + MARIANE + RSE + CODEN + MIRAGE
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 1 RSC (OS) RSC (NAC) RSC (WAC) DYNAMO C (MIDST) RSC (LIDAR) DYNAMO 2 DYNAMO C (IENA) DYNAMO C (MEMOIRE) DYNAMO C (DEMAI) DYNAMO C (SOURCE) Vue coté +Y
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 1 DYNAMO C (MIDST) CODEN MIRAGE NIRGAL MARIANE Vue coté -Y
JETS DE TUYERES DE L’ORBITEUR ASPI FAMILLE 1 Les jets de tuyères convergent entre eux. Cela risque de provoquer des interférences sur les champs de vues de certains équipements dont les ojectifs sont des relevés optiques.
JETS DE TUYERES DE L’ORBITEUR ASPI FAMILLE 1 Quel que soit la position de l ’antenne HGA sont champ de vision reste libre Les jets de tuyères interfèrent sur l’antenne
CHAMPS DE VUES DE L’ORBITEUR ASPI FAMILLE 1 Tous les champs de visions représentés n’ont pas d’interférences avec d’autres éléments. La structure de DYNAMO C n’est pas en contact avec l ’orbiteur, pour que les champs de vues de cette expérience aient le moins d ’interférences possibles. Il faudra donc modifier la structure de l ’orbiter ou prolonger la structure du châssis de cette expérience.
CHAMPS DE VUES DE L’ORBITEUR ASPI FAMILLE 1 Les champs de visions de DYNAMO C sont coupés par le mât déployable de l’expérience MEMOIRE et les supports de tuyères
CHAMPS DE VUES DE L’ORBITEUR ASPI FAMILLE 1 Les champs des antennes bandes X et des senseurs solaires sont coupés par l’antenne râteau de l’expérience MISDT
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 2 MAMBO + MIRAGE + MARIANE + MEMOIRE + RSE + CODEN
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 2 MAMBO (expérience) RSC (LIDAR) RSC (OS) RSC (WAC) RSC (NAC) MEMOIRE MEMOIRE (boîtier électronique) Vue coté +Y
CONSTITUTION DE L’ORBITEUR ASPI FAMILLE 2 MAMBO (expérience) (Boîtier électronique MAMBO) CODEN MIRAGE MARIANE Vue coté -Y
CHAMPS DE VUES DE L’ORBITEUR ASPI FAMILLE 2 Tous les champs de visions représentés sont sans encombres. Seul le mât déployable interfère le champ de vue de WAC
CHAMPS DE VUES DE L’ORBITEUR ASPI FAMILLE 2 Quel que soit la position de l’antenne HGA son champ de vision reste libre Les jets de tuyères n’interfèrent pas sur le mât déployable de l’expérience MEMOIRE. Par contre ces jets vont créés des efforts parasites sur la phase finale de récupération de OS.
Solution retenue pour la mission RSC de L’ORBITEUR ASPI FAMILLE 2 La solution retenue sera de tourner de 90° l’expérience RSC. Elle sera diriger en +X.
JETS DE TUYERES DE L’ORBITEUR ASPI FAMILLE 2 Les jets de tuyères n’interfèrent donc plus sur les éléments ainsi positionnés.
Calcul de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l’axe Y. • Y = Centre de gravité de l’orbiteur équipé, proposé par le concepteur = 0 mm • M = Massede l’orbiteur équipé donné par le concepteur = 1050 Kg • Y0 = Centre de gravité de l’orbiteur sans équipements. • M0 = Massede l’orbiteur sans équipements. • mi = Masse de chaque équipements installés sur l’orbiteur . • gi = Centre de gravité de chaque équipements installés sur l’orbiteur. • Y.M= mi.gi+Y0.M0=0 car Y=0 donc Y= ( mi.gi+Y0.M0)/M • Alors • mi.gi+Y0.M0=0 • mi.gi=- Y0.M0 • Y0=- mi.gi et M0=M- mi • M0 • Dans nos calculs : • Y1 représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1. • Y1’ représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1 corrigée. • Y1’’ représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1 recorrigée. • Y2 représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 2.
Positionnement des équipements d’origine ASPI. Vue coté +X
Positionnement des équipements de la Famille 1. Vue coté +X
Positionnement des équipements de la Famille 2. Vue coté +X
Calcul de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l ’axe Y.
Configuration initiale Y1, calculée pour équilibrer le centre de gravité de la famille 1 suivant l’axe Y. Analyse initiale des équipements Gueuse d’équilibrage de 16,34 Kg Inconvénients : La gueuse d’équilibrage est de 16,34 Kg. L’expérience DYNAMO C devra avoir sa structure nettement prolongée, car sur cette représentation elle n’est pas en contact avec la plate forme. Risque de bouger en tests vibratoires. Avantages : On positionne le plus possible les équipements comme à l’origine sans modifications de la structure. Masse totale : 1061,5 Kg.
Configuration Y1’ calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Y. Gueuse d’équilibrage de 0,36 Kg NAC WAC Modifications apportées : Positionnement de WAC sur le mur +Y au lieu de sa position prévue sur le panneau +X. Inconvénients : L’entraxe entre NAC & WAC est de 1718,1 mm et le décalage en X de 349,4 mm. Il faudra vérifier que l’écart maximum autorisé entre leur champs de vu est acceptable. Toujours les même problèmes avec DYNAMO C, que précédemment décrit. Avantages : La gueuse d’équilibrage est de 0,36 Kg. Pas de modification de la structure. Masse totale : 1045,6 Kg.
Champs de vues de Y1’ 1718,1 mm Le nouveau positionnement de NAC sur le mur +Y au lieu de sa position prévue sur le panneau +X ne pose pas de problèmes. Son champ de vue passe sans encombres, ainsi que tous ceux de RSC. Son positionnement en hauteur est dû au fait que les champs de vues des senseurs solaires empêchent toutes autres possibilités. 22,5° H 349,4 mm La hauteur H estimée, qui représente la distante à partir du plateau +X ou le faisceau de NAC et WAC vont se croiser est : Tan 22,5° = 1718,1/(H+349,4) H = (1718,1/Tan 22,5°)-349,4 H = 3799 mm
Configuration Y1’’ calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Y. Modifications apportées : Alignement de l’ensemble RSC, et recentrage à +145mm en +Y sur le panneau +X. Inconvénients : Il faudra modifier l’évidemment du panneau +X pour assurer la fixation de RSC ainsi configuré. Toujours les mêmes problèmes pour DYNAMO C , que précédemment décrit. Avantages : Pas besoin de gueuse d’équilibrage. Masse totale : 1045,2 Kg.
Champs de vues de Y1’’ Le nouveau positionnement de RSC ne pose pas de problèmes. Tous les champs de vues passent sans encombres. Les autres équipements n ’ont pas eux non plus de problèmes d’interférences.
Configuration initiale Y2, calculée pour équilibrer le centre de gravité de la famille 1 suivant l’axe Y. Gueuse d’équilibrage de 29.9 Kg Analyse initiale des équipements Inconvénients : La gueuse d’équilibrage est de 29,9 Kg. Avantages : On positionne le plus possible les équipements comme à l’origine sans modification de la structure. Masse totale : 1090,9 Kg.
Configuration Y2’ calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Y. Coden Mariane Mirage Gueuse d’équilibrage de 1.73 Kg Modifications apportées : Positionnement de Coden, Mariane et Mirage du coté du mur +Y au lieu de -Y Inconvénients : Une étagère devra être ajoutée pour la fixation de Mariane. Son positionnement est justifié par le fait que les jets de tuyères convergent et risquent de perturber cet équipement si sa situation géographique s’en approche de trop. On pourra éventuellement la placée très près sous MIRAGE. On risque dans ce cas de décentrer Y2’ en Z. Avantages : La gueuse d’équilibrage n’est que de 1,73 Kg. Masse totale : 1062,7 Kg.
Champs de vues de Y2’ Le nouveau positionnement de Coden, Mariane et Mirage du coté du mur +Y au lieu de -Y ne posent pas de problèmes. Tous les champs de vues passent sans encombres.
Calcul de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l’axe Z. • Z = Centre de gravité de l’orbiteur équipé, proposé par le concepteur = 0 mm • M = Massede l’orbiteur équipé donné par le concepteur = 1050 Kg • Z0 = Centre de gravité de l’orbiteur sans équipements. • M0 = Massede l’orbiteur sans équipements. • mi = Masse de chaque équipements installés sur l’orbiteur . • gi = Centre de gravité de chaque équipements installés sur l’orbiteur. • Z.M= mi.gi+Z0.M0=0 car Z=0 donc Z= ( mi.gi+Z0.M0)/M • Alors • mi.gi+Z0.M0=0 • mi.gi=- Z0.M0 • Z0=- mi.gi et M0=M- mi. • M0 • Dans nos calculs : • Z1 représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1 (d’après la configuration initiale Y1, calculée pour équilibrer le centre de gravité de la famille 1 suivant l’axe Y). • Z1’ représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1 modifiée (d’après la configuration initiale Y1’ calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Y). • Z1’’ représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 1 remodifiée, (d’après la configuration initiale Y1’’, calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Y). • Z2 représentera le centre de gravité de l ’orbiteur composé des éléments de la Famille 2 (d’après la configuration initiale Y2, calculée pour équilibrer le centre de gravité de la famille 2 suivant l’axe Y).
Calcul de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l ’axe Z.
Configuration initiale Z1, calculée pour équilibrer le centre de gravité de la famille 1 suivant l’axe Z, en fonction de Y1 équilibré. Gueuse d’équilibrage de 1,75 Kg pour Z1 Analyse initiale des équipements Gueuse d’équilibrage de 16,34 Kg pour Y1 passe coté +Z sur le panneau -Y Inconvénients : Identique à Y1. Gueuse supplémentaire de 11,31 Kg. Avantages : Identique à Y1. Masse totale : 1078,59 Kg, dont 1,75 Kg de gueuses d’équilibrage.
Configuration initiale Z1’, calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Z, en fonction de Y1’ équilibré. Coden Gueuse d’équilibrage de 0,99 Kg pour Z1’ . Lidar Gueuse d’équilibrage de 0,36 Kg pour Y1’ passe coté +Z sur le panneau +Y Mât déployable Modifications apportées : On met LIDAR coté +Z sur le plateau +X, on décale le mât déployable de 300mm en +Z et on met CODEN au milieu du plateau -Y. Inconvénients : Idem à Y1’. Gueuse supplémentaire de 1 Kg. Avantages : Idem à Y1’. Peu de masse ajoutées en gueuses d’équilibrage. Masse totale : 1061,85 Kg , dont 1,35 Kg de gueuses d’équilibrage. Calculer si l ’on peut retirer la gueuse de 0,99 Kg en inversant WAC & OS
Champs de vues de Z1’ 200 mm Des équerrages pour la fixation des équipement sur le mur -Y seront à prévoir. OS ne se trouve plus entre WAC et LIDAR. Il reste à vérifier que l’entraxe entre NAC & WAC est acceptable et correspond à l’écart maximum autorisé pour que la mission fonctionne. Le nouveau positionnement de Coden, à apporté une modification de la structure de fixation de l’antenne râteau. L’antenne MIDST sphérique a été décalée de 200mm en +Y pour qu’elle ait un champ libre vers l’antenne râteau. Tous les champs de vues passent sans encombres.
Configuration initiale Z1’’, calculée pour rééquilibrer le centre de gravité de la famille 1 suivant l’axe Z, en fonction de Y1’’ équilibré. Lidar OS WAC NAC Mirage Coden DYNAMO C Mât déployable DYNAMO 2 Modifications apportées :On met le centre de gravité de CODEN à 225 mm en +Z sur le panneau-Y, on décale OS, NAC et WAC de 150 mm en +Z, LIDAR 200 mm en +Z, le mât déployable de 500 mm en +Z, Mirage de 250 mm en +Z, DYNAMO C de 150 mm en +Z & DYNAMO 2 de 83 mm en +Z. Inconvénients : Idem à Y1’’. Gueuse supplémentaire de 6,12 Kg. Avantages : Il n’y a besoin d’aucune gueuse d’équilibrage. Masse totale : 1060,50 Kg.
Champs de vues de Z1’’ CDV DYNAMO 2 L’antenne MIDST sphérique a été décalée de 500mm en +Z pour qu’elle ait un champ libre vers l’antenne râteau. Le nouveau positionnement de RSC ne pose pas de problèmes. Tous les champs de vues passent sans encombres. DYNAMO 2 a été décalé de 50 mm en +X afin que ses champs de visions n ’interfèrent plus avec RSC ainsi positionné. 500 mm CDV NEIGE CDV antenne UHF CDV Antenne bande X CDV RSC 50 mm
Champs de vues de Z1’’ Le nouveau positionnement de Coden, Mariane, Mirage et NIRGAL prennent en compte la liberté de leur champ de vue ainsi que ceux des senseurs solaires, de l ’antenne UHF et des jets de tuyère. CDV senseurs solaires CDV NIRGAL CDV CODEN MARIANE CDV MIRAGE Jets de tuyères
Champs de vues de Z1’’ Jets de tuyères En décalant le mât de 500 mm en +Z, les jets de tuyères interfèrent, comme le montrent les deux figures ci-dessus. Pour éviter cela, la solution de descendre le mât déployable de 100 mm en -X permet d ’éviter ce problème comme le montre la figure ci-dessous. Les positions retenues pour Z1’’ correspondent à la figure ci-dessus. Une légère modification de la structure est donc à prévoir pour la fixation du mât déployable. Jets de tuyères
Configuration initiale Z2, calculée pour équilibrer le centre de gravité de la famille 2 suivant l’axe Z, en fonction de Y2 équilibré. Gueuse d’équilibrage de 13,77 Kg pour Z2 Gueuse d’équilibrage de 29.9 Kg pour Y2 . Analyse initiale des équipements Inconvénients : Idem à Y2. Gueuse supplémentaire de 13,77 Kg. Avantages : Idem à Y2. Masse totale : 1088,87 Kg , dont 43.67 Kg de gueuse d’équilibrage.
Configuration initiale Z2’, calculée pour rééquilibrer le centre de gravité de la famille 2 suivant l’axe Z, en fonction de Y2’ équilibré. MAMBO RSC Coden Mariane Gueuse d’équilibrage pour Y2’ de 1.73 Kg sur le panneau +Y. Modifications apportées :On décale Mariane de 270mm, le mât déployable de 300mm, Mambo de 200mm, RSC de 420mm & Coden de 1050mm en +Z. Inconvénients : Idem à Y2’. Avantages : Idem à Y2’. On ne rajoute pas de gueuse d’équilibrage. Masse totale : 1046,93 Kg , dont 1.73 Kg de gueuse d’équilibrage.
Champs de vues de Z2’ Pour permettre ce nouveau positionnement de Coden et RSC, la structure de la plate forme doit subir des modifications notables, comme le montre la figure ci-dessous. Il faut évider une partie du plateau supérieur et prolonger la tablette de fixation pour RSC ainsi que prévoir des équerrage pour la fixation de CODEN. CDV MIRAGE CDV CODEN CDV LIDAR CDV WAC CDV NAC Le nouveau positionnement de Coden, MIRAGE et RSC du coté du mur +Y au lieu de -Y ne posent pas de problèmes, comme le montre la figure ci-dessus. Tous les champs de vues passent sans encombres. MIRAGE CODEN LIDAR OS WAC NAC
Champs de vues de Z2’ CDV antenne UHF Le nouveau positionnement du Mât déployable ne pose pas de problèmes avec les jets de tuyères, comme le montrent les figures de gauche. Le nouvel emplacement de MAMBO interfère le champ de vu de l ’antenne UHF. De ce fait il est nécessaire de positionner cette antenne 70 mm plus haut, comme le montrent les figures de droite. Tous les champs de vues passent donc sans encombres. Jets de tuyères 70 mm CDV NEIGE CDV antenne bande X CDV antenne UHF
Analyse de Z2’ Étant donné qu ’avec de telles solutions, l’orbiteur aurait beaucoup trop de modifications de sa structure, il vaut mieux essayer de positionner RSC sur le plateau +X et de faire varier le positionnement de Mambo simultanément, afin d ’équilibrer le tout suivant l ’axe des Y et également celui des Z.
Recalcule de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l ’axe Y de la famille 2.
Recalcule de dérive du centre de gravité de l’orbiteur avec les familles d’équipements voulu par le CNES suivant l ’axe Z de la famille 2.