Download
1 / 25
250 likes | 403 Views
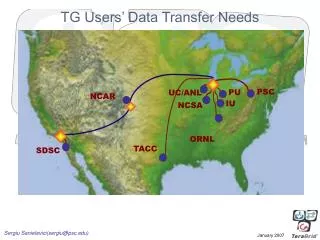
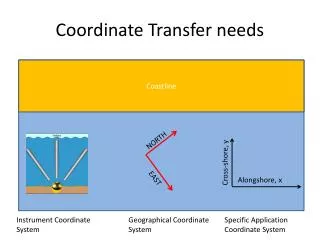
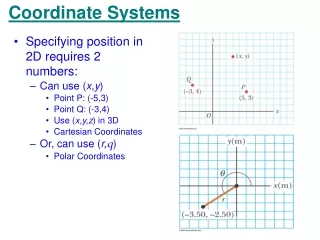
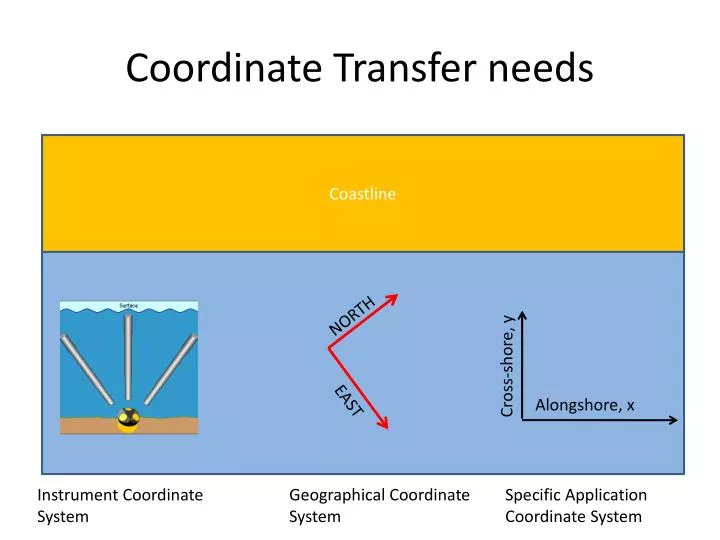
Coordinate Transfer needs. Coastline. NORTH. Cross-shore, y. Alongshore, x. EAST. Instrument Coordinate System. Geographical Coordinate System. Specific Application Coordinate System. Rotation Matrix. (1) Rotation of the axes. (2) Rotation of an Object relative to fixed axes. x.

E N D
Coordinate Transfer needs Coastline NORTH Cross-shore, y Alongshore, x EAST Instrument Coordinate System Geographical Coordinate System Specific Application Coordinate System
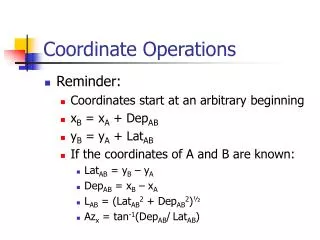
Rotation Matrix • (1) Rotation of the axes. • (2) Rotation of an Object relative to fixed axes x yo θ xo y
Rotate Co-ordinate Axis System(anti-clockwise) y y yo ѳ xo x x
Rotate Object (anti-clockwise)= Rotate Axis (clockwise) y y y1 x1 ѳ x x
Rotate Co-ordinate Axis System y y yo y’ xo x x ѳ ѳ x’
square = 0 0 0 1 1 1 1 0 0 0 Sq2 = 0 0 0.3420 0.9397 1.2817 0.5977 0.9397 -0.3420 0 0 theta = 20 Sq1 = 0 0 -0.3420 0.9397 0.5977 1.2817 0.9397 0.3420 0 0
Example • (1) Make a matlab script that does the rotation (2-d) • (2) Make it a function • (3) Rotate some current data
function X1=rotate_2d(X,a) • % • [m,n]=size(X); • j=1; • if n==2; • X=X'; • j=2; • end • R=[ cos(a) sin(a) • -sin(a) cos(a) ]; • X1=R*X; • if j==2; • X1=X1'; • end • end
a=load('Springmaid_Dec_2005.txt'); yyyy = a(:,1); mo = a(:,2); dd = a(:,3); hh = a(:,4); mi = a(:,5); ss = a(:,5); % u = a(:,7); v = a(:,8); % Time = datenum(yyyy,mo,dd,hh,mi,ss); % U=[u,v]; Uxy=rotate_2d(U,45); ux = Uxy(:,1); uy = Uxy(:,2); % figure subplot(211); plot(Time,u,Time,v); legend('u','v') subplot(212); plot(Time,ux,Time,uy); legend('along','cross') % figure subplot(211); quiver(Time-Time(1),Time*0,u,v); axis equal subplot(212); quiver(Time-Time(1),Time*0,ux,uy); axis equal
Rotations around x-, y- and z- axes • Pitch is up and down like a box lid. • Yaw is left and right like a door on hinges (Heading) • Roll is rotation.
Anticlockwise rotations around x-, y- and z- axes z Roll y α z β Pitch x γ y Yaw x Anticlockwise rotations
3-D Clockwise Rotation cos(β)∙cos(γ) cos(β)∙sin(γ) sin(β) -sin(α)∙sin(β)∙cos(γ)-cos(α)∙sin(g) -sin(α)∙sin(β)∙sin(γ)+cos(α)∙cos(γ) sin(α)∙cos(β) -cos(α)∙sin(β)∙cos(γ)+sin(α)∙sin(g) -cos(α)∙sin(β)∙sin(γ)-sin(α)∙cos(γ) cos(α)∙cos(β)
Rotate 3-D function X1=rotate_3da(X,a,b,g) [m,n]=size(X); j=1; if n==3; X=X'; j=2; end Rx = [ 1 0 0 % Roll 0 cos(a) sin(a) 0 -sin(a) cos(a)]; Ry = [ cos(b) 0 sin(b) % Pitch 0 1 0 -sin(b) 0 cos(b)]; Rz = [ cos(g) sin(g) 0 % Yaw -sin(g) cos(g) 0 0 0 1]; R = Rx*Ry*Rz; % R = [ cos(b)*cos(c), cos(b)*sin(c), sin(b) % - cos(a)*sin(c) - cos(c)*sin(a)*sin(b), cos(a)*cos(c) - sin(a)*sin(b)*sin(c), cos(b)*sin(a) % sin(a)*sin(c) - cos(a)*cos(c)*sin(b), - cos(c)*sin(a) - cos(a)*sin(b)*sin(c), cos(a)*cos(b)] X1=R*X; if j==2; X1=X1'; end end
Exercise 1 • Assume we measure the flow from a boat that pitches and rolls because of the wave motion. • The data are measured in a ship coordinate frame (x,y,z) and the flow is ux=10cm, uy=14cm, uz=5cm. • The heading of the boat is 120deg (Magnetic north) and the magnetic declination is 8degs W and the pitch and roll are 10 and 12degs (anticlockwise) respectively. • What is the true east, north and upward components of the flow? • What is the magnitude of the current? • ( Write a MATLAB function that does the rotation of the vector and corrects for pitch and roll) y X
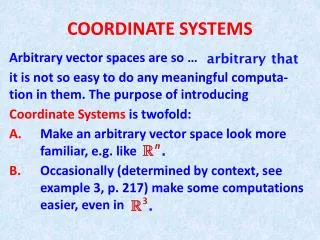
Converting from an arbitrary (non-orthogonal) coordinate system to a Cartesian coordinate system
Doppler Effect is used to measure velocities along the direction of the acoustic wave propagation (1-D) λ2 λ λ1 c=λ·f c=λ·f c-u=λ·f1 c+u=λ·f2 f1 <f2 f1 =f-Δf f2 =f+Δf c-u=λ·f1 c+u=λ·f2
1-D Doppler current metersPrinciple of operation c : speed of sound in water (depends on T and S) Fo : Frequency of sound transmitted by instrument Df: Doppler shift due to current V V : current speed along the direction of sound propagation Images from: Sontek/YSI
3-D Doppler current metersPrinciple of operation w v V2 V1 c : speed of sound in water (depends on T and S) Fo : Frequency of sound transmitted by instrument Dfi: Doppler shift due to current Vi along beam direction Vi : current speed along the direction of sound propagation (beam i) V3 u Image from: Sontek/YSI
Three Beam to 3-D phi(1) = AOC1 theta (1)= D1OB1 z phi(2) = AOC2 theta (2)= D1OB2 y C2 C1 A B2 B1 x D2 O D1 C3 phi(3) = AOC3 theta (3)= D1OB3 B3
Rotation from arbitrary system to orthogonal coordinate system function T=rotation_matrix(phi,theta) % % phi (in degs) = angle of beam from vertical (z) axis % (phi 1 if the same angle for all beams or % size(phi)=3 if each beam has a different angle % theta (in degs) = angle of beam projection(s) to plane from x, measured counterclockwise % % Vi=T*V and V=inv(T)*Vi % where V=[u,v,w]'; vector of velocities along the x,y,z axis % Vi=[v1,v2,v3]' ; vector of along beam 1, 2 and 3 velocities % % N=length(phi); if N==1; phi=ones(3,1)*phi*pi/180; elseif N==3 phi=phi*pi/180; else error('The Beam angles must be 1 or 3') end phi=phi(:); theta=theta*pi/180; % T(1,:)=[sin(phi(1))*cos(theta(1)) sin(phi(1))*sin(theta(1)) cos(phi(1))]; T(2,:)=[sin(phi(2))*cos(theta(2)+theta(1)) sin(phi(2))*sin(theta(2)+theta(1)) cos(phi(2))]; T(3,:)=[sin(phi(3))*cos(theta(3)+theta(1)) sin(phi(3))*sin(theta(3)+theta(1)) cos(phi(3))];
Two Beam to 3-D phi(1) = AOC1 theta (1)= D1OB1 z phi(2) = 0 theta (2)= 0 y C1 A B1 x O D1 C3 phi(3) = AOC3 theta (3)= D1OB3 B3
Find the mean downstream velocity (Ux) y -10cm/s x 13cm/s 125degs 85degs