Download
1 / 1
10 likes | 182 Views
Handedness and Perception of Hand-Held Tools. 4.60. 5.0. 4.00. 4.0. 3.0. Mean hammer rating. 2.0. 1.0. 0. Non-preferred Hand. Preferred Hand. 60cm. Experiment 2 Procedure. Abstract. Handedness and Haptic Perception. Experiment 1 Procedure.

E N D
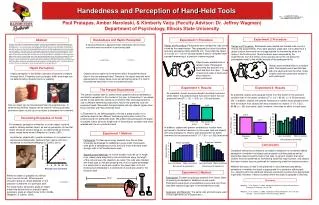
Handedness and Perception of Hand-Held Tools 4.60 5.0 4.00 4.0 3.0 Mean hammer rating 2.0 1.0 0 Non-preferred Hand Preferred Hand 60cm Experiment 2 Procedure Abstract Handedness and Haptic Perception Experiment 1 Procedure Previous research has indicated that individuals can perceive the properties of hand-held objects by wielding them. The current research investigates possible differences in this ability due to handedness. In Experiment 1, we compared how well participants felt they would be able to perform a hammering task with an object in their preferred hand with how well they felt they could perform the same task with the same object in their left hand. Not surprisingly, preliminary results indicate that participants felt that they could perform a hammering task better with an object in their preferred hand than with the same object in their non-preferred hand. In Experiment 2, we compared where participants chose to grasp an object to be used in a hammering task in their preferred hand with where they chose to grasp the same object in their non-preferred hand. Preliminary results indicate that participants tended to “choke up” (grasp the object further from the bottom) both when performing a precision hammering task (with either hand) and when using their non-preferred hand (to perform any hammering task). The results illustrate a subtle influence of handedness in perceiving properties of wielded objects. A hand preference is apparent when individuals tend to favor one hand over the another in performing task. Design and Procedure: Participants were handed the rods one at a time by the experimenter. They grasped the rod at the bottom and were allowed to freely wield the rod. They rated the object on a scale of 1-7 as to how appropriate it was to complete either a power hammering or a precision hammering task. Design and Procedure: Participants were seated and handed rods one at a time by the experimenter. They were asked to wield each rod to determine a grasp location that would be most appropriate for hammering either the spike or the finishing nail. Grasp locations were measured by the experimenter from the bottom of the rod (the part of the rod below the participants hand) to the middle knuckle of the participant’s fist. Objects were wielded twice in a random order. Participants performed this task with one hand and then the other. Order of tasks and order of hand used were varied for each participant. Objects were wielded twice in a random order. Participants performed this task with one hand and then the other. Order of tasks and hand used were varied for each participant. Haptic Perception Haptic perception is the ability to perceive properties of objects through touch. Properties such as length, width, and shape can be determined by dynamic touch or wielding. Objects may be easier to move when held in the preferred hand than in the non-preferred hand. Therefore, the object may feel more appropriate for certain tasks (such as hammering) when it is held in the preferred hand than in the non-preferred hand. Experiment 1: Results Experiment 2: Results The Present Experiments As predicted, objects were perceived to be better hammers when held in the preferred hand than when held in the non-preferred hand [F (1, 12) = 10.91, p < .05] (see below). The present studies seek to answer these questions about handedness and haptic perception in the context of tool use. In Experiment 1 we asked people to rate particular objects as to whether they were appropriate to use in different hammering tasks when held in the preferred and non-preferred hands. We predict that participants will rate objects higher when they hold them with their preferred hand. As predicted, objects were grasped further from the bottom in the precision condition than in the power condition [F (1, 12) = 90.06, p < 0.5] (see below, left). In addition, objects with greater resistance to rotation were grasped further from the bottom than objects with less resistance to rotation [ F (11, 132) = 60.98, p < .05] (see below, right). However, there was no effect of hand used. How an object can be moved determines its potential uses. In determining whether objects can be used for various purposes, perceivers seem to pick up on an object’s resistance to movement. 35 30 35 In Experiment 2, we asked people to choose a grasp position on a particular object in two different hammering tasks when held in the preferred and non-preferred hands. We predict that participants will grasp the object further along its length both in the precision condition and when wielded with the non-preferred hand. 25 30 (29.7) 20 25 Perceiving Properties of Tools Grasp Position (cm) 15 (20.7) 20 10 Grasp Position (cm) 15 For example, perception of whether or not an object could be used for striking another object, as well as perception of how that object should be used in doing so, are determined by how the object resists being moved (Wagman & Carello, 2001). 5 10 In addition, objects with greater resistance to rotation were perceived to be better hammers for the power task and objects with less resistance to rotation were perceived to be better hammers for the precision task [F (11, 132) = p <.05] (see below) 0 5 Precision Task Power Task 6 0 Experiment 1 Method Less resistance More resistance 5 Resistance to movement In particular, objects with greater resistance to movement are perceived as being better hammers than objects with less resistance to movement (Wagman & Carello, 2001). 4 Precision Condition Hammer Rating Power Condition Participants: Thirteen psychology students from Illinois State University participated for additional course credit. Participants were given a handedness survey, and only those that were rated strongly right or left handed were used. Apparatus and Materials: 12 hollow wooden rods (60 cm in length, 5 cm radius) were weighted in various locations along the length of the rod and were the objects to be rated. The rods were marked with black tape to indicate grasping end. A 25 cm spike embedded in a small block of wood was used for the power task. A 2.3 cm finishing nail embedded in a small block of wood was used for the precision task. 6 6 3 5 5 Conclusions r2= .92 2 4 4 Hammer Rating Hammer Rating 3 3 1 Consistent with previous research, an object’s resistance to movement affects perception of whether that object can be used in a striking task as well as where that object should be held in that task. In general, objects that resist rotation more are preferred for hammering tasks that require power, and objects that resist rotation less are preferred for hammering tasks that require precision. Whether the object is held in the preferred or non-preferred hand affects perception of whether the object is appropriate for a particular striking task (i.e., objects held in the preferred hand are perceived as being more appropriate in general). However, it does not affect where the object is grasped in that task. 0 5 10 15 20 25 2 2 Resistance to movement 1 1 0 0 Less resistance More resistance Less resistance More resistance Resistance to movement Resistance to movement Experiment 2 Method Where an object is grasped also affects how it can be moved. Where people choose to grasp an object depends on the precision constraints of a particular task. For power tasks, perceivers grasp an object toward the bottom and for precision tasks, perceivers grasp an object closer to the middle (Wagman, & Carello, 2003). Participants: Fourteen psychology students from Illinois State University participated for additional course credit. Participants were given a handedness survey and only those that were rated strongly right or left handed were used. Apparatus and Materials: The same rods and nails were used in this Experiment as in Experiment 1. References Wagman, J. B. & Carello, C. (2001). Affordances and inertial constraints on tool use. Ecological Psychology, 13, 173-195. Wagman, J. B. & Carello, C. (2003). Haptically creating affordances: The user-tool interface. Journal of Experimental Psychology: Applied. Paul Pratapas, Amber Naroleski, & Kimberly Varju (Faculty Advisor: Dr. Jeffrey Wagman) Department of Psychology, Illinois State University