Download
1 / 38
410 likes | 697 Views
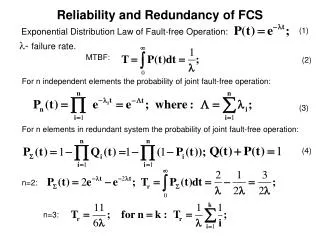
Reliability-Redundancy Allocation for Multi-State Series-Parallel Systems. Zhigang Tian , Ming J. Zuo , and Hongzhong Huang IEEE Transactions on Reliability, vol. 57, No. 2, June 2008 Presented by: Hui -Yu, Chung Advisor: Frank Yeong -Sung, Lin. Agenda. Introduction

E N D
Reliability-Redundancy Allocation for Multi-State Series-Parallel Systems ZhigangTian, Ming J. Zuo, and HongzhongHuang IEEE Transactions on Reliability, vol. 57, No. 2, June 2008 Presented by: Hui-Yu, Chung Advisor: Frank Yeong-Sung, Lin
Agenda • Introduction • Problem Formulation • Design Variables • System Utility Evaluation • Formulation of System Cost • Characteristics of the Optimization Problem • Physical Programming-Based Optimization Problem Formulation • Optimization Solution Method – Genetic Algorithm • An Example • The Joint Reliability-Redundancy Optimization Results • The Redundancy Optimization Results • Sensitivity Analysis for System Cost and System Utility • Conclusions
Introduction • Component – An “Entity” • Can be connected in a certain configuration to form a subsystem, or system. • Multi-State System • Many systems can perform their intended functions at more than two different levels • From perfectly working to completely failed • Provide more flexibility for modeling • Performance Measure – System Utility
Introduction • State Distribution • Used to describe the reliability of a MMS • Two ways to improve the utility of a multi-state series-parallel system: • To provide redundancy at each stage • To improve the component state distribution • Make a component in states w.r.t. high utilities and probabilities
Introduction • Previous studies on optimization of MMSs focused on only redundancies • Only partial optimization • The option of selecting different versions of components provides more flexibility
Assumptions • The states of the components in a subsystem is independent identically distributed (i.i.d.) • The components, and the system may be in M + 1 possible states, namely, 0, 1, 2, …, M • The multi-state series parallel systems under consideration are coherent systems
Agenda • Introduction • Problem Formulation • Design Variables • System Utility Evaluation • Formulation of System Cost • Characteristics of the Optimization Problem • Physical Programming-Based Optimization Problem Formulation • Optimization Solution Method – Genetic Algorithm • An Example • The Joint Reliability-Redundancy Optimization Results • The Redundancy Optimization Results • Sensitivity Analysis for System Cost and System Utility • Conclusions
Problem Formulation • The structure of a multi-state series-parallel system: N subsystems connected in series, each subsystem i has independent identically distributed components connected in parallel The prob. of component i in state j is
Design Variables • State distributions • i = 1, 2, …, N; j = 1, 2, …, M • Redundancies • i = 1, 2, …, N • Reliability means the prob. of working
Reliability of a component • Consider a three-state system • Three States: { 0,1,2 } • State Distributions: • Statements: • 1)The prob. that a component is in state 1 or 2 is the reliability of this component that its state is greater or equal to 1(“working” ) • Reliability: • 2) The prob. of component in state 2 is the reliability of it that its state is greater than or equal to 2 • Reliability:
System Utility Evaluation • System utility: The expected utility • The prob. that the system is in state s or above: (s = 0, 1, …, M) • The System Utility U: : Utility when the system is in state s
Formulation of System Cost • The cost of subsystem i with parallel components: • : cost-reliability relationship function for a component in subsystem i • : cost of the components in subsystem i • : interconnecting cost in parallel subsystem • , : characteristic constants
Formulation in System Cost • In a (M + 1) state MMS: • Reliability of component i under treatment k: • Assumption: • There are M treatments that can influence the component’s state distribution, and treatment k will increase the prob. of the component in state k, but will not influence the prob. of the component in the states above k
Formulation of System Cost • The cost of the component: • The system cost:
Characteristics of the Optimization Problem • Objective to be optimized: • System Utility, • System Cost • Determine and to maximize system utility and minimize cost • Mixed integer optimization problem • Continuous variables: state distributions • Integer variables: redundancies
Characteristics of the Optimization Problem • Formulated as a single-objective optimization problem: • Either cost or utility can be a design objective, while the other can be a constraint
Characteristics of the Optimization Problem • Formulated as a multi-objective optimization problem: • Three approaches: • The surrogate worth trade-off method • The fuzzy optimization method • Physical programming method • In this case, physical programming approach is used
Physical Programming-Based Optimization Problem Formulation • Physical Programming Optimization • The Decision Maker’s preference is considered in the optimization process • Use of class functions • Class Functions: • The value reflects the preference of the designer on objective function value • Four types ofof “soft” class function: • Smaller is better, Larger is better, Value is better, and Range is better • Here, we use “Smaller is better”
Physical Programming-Based Optimization Problem Formulation • Class-1S Class Function(for Cost) • Monotonously increasing function • Used to represent the objectives to be minimized • Class-2S Class Function (for Utility) • Monotonously decreasing function • Used to represent the objectives to be maximized Corresponding class function value Design Objective
Physical Programming-Based Optimization Problem Formulation • Transforming a physical programming problem to a single-objective optimization problem: f: aggregate objective function
Genetic Algorithm as the Optimization Solution Method • Genetic Algorithm: • Most effective algorithm to solve mixed integer optimization problems • Chromosome: one solution in GA • Population: a group of chromosome in each iteration • Four stages in GA: • Initialization, selection, reproduction, termination
The procedure of GA • Initialization • Specify the GA operators • Specify the GA parameters • Evaluation • Using fitness value to get P(k) and B(k) • Construct new population • Chromosome is replaced by the best fitness value. • Terminate • When reaching a maximal iteration
Agenda • Introduction • Problem Formulation • Design Variables • System Utility Evaluation • Formulation of System Cost • Characteristics of the Optimization Problem • Physical Programming-Based Optimization Problem Formulation • Optimization Solution Method – Genetic Algorithm • An Example • The Joint Reliability-Redundancy Optimization Results • The Redundancy Optimization Results • Sensitivity Analysis for System Cost and System Utility • Conclusions
The Joint Reliability-Redundancy Optimization Results • In Physical programming framework • System utility: Class-2S objective function • System cost: Class-1S objective function • Mixed integer programming problem • 9 design variables: • GA parameters (run 30 times)
The Joint Reliability-Redundancy Optimization Results • The result of the optimization:
The Redundancy Optimization Results • Consider different versions of components • Otherwise, the results may not be optimal • Integer programming problem • The other conditions remain the same Component version for stage i
The Redundancy Optimization Results • The Result of the optimization:
Sensitivity Analysis for System Cost and System Utility • Sensitivity analysis of system cost: • 9 design variables • Model parameters , • Since they are affect the system costs • Using the partial derivative to analyze • While keeping all the others the same
Sensitivity Analysis for System Cost • For any , is always positive • System cost increases with the increase in • The sensitivity of system cost decreases a bit with the increase of ,( < 0.05 ) • When > 0.05, the sensitivity always increases with the increase of • System cost is more sensitive to stage 3 • Since in stage 3 is larger
Sensitivity Analysis for System Cost • Sensitivity w.r.t. the parameter, and • Positive Constant Value • Cost increases with the increase of the parameter • Positive and more sensitive
Sensitivity Analysis for System Utility • For any , is always positive • The system utility increases with the increases of • System utility becomes less sensitive to with the increase of it. • The utility is more sensitive to the distribution variables associated with state 2
Agenda • Introduction • Problem Formulation • Design Variables • System Utility Evaluation • Formulation of System Cost • Characteristics of the Optimization Problem • Physical Programming-Based Optimization Problem Formulation • Optimization Solution Method – Genetic Algorithm • An Example • The Joint Reliability-Redundancy Optimization Results • The Redundancy Optimization Results • Sensitivity Analysis for System Cost and System Utility • Conclusions
Conclusions • Two options too improve the system utility of a multi-state series-parallel system: • Provide redundancy at each stage • Improve the component state distributions • Physical programming-based optimization is introduced and used in this problem • Sensitivity Analysis • Which can reflect the facts on the model