Download

1 / 84
910 likes | 1.22k Views
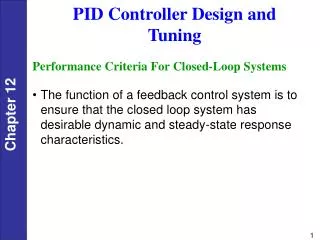
Controller Design, Tuning. Performance Criteria for Closed-loop systems. Must be stable. Provide good disturbance rejection---minimizing the effects of disturbance. Have good set-point tracking---Rapid, smooth responses to set-point changes Eliminate steady state error (zero offset)

E N D
Performance Criteria for Closed-loop systems • Must be stable. • Provide good disturbance rejection---minimizing the effects of disturbance. • Have good set-point tracking---Rapid, smooth responses to set-point changes • Eliminate steady state error (zero offset) • Avoid excessive control action. • Must be robust( or insensitive) to process changes or model inaccuracies.
Methods for PID controller settings Classical methods: • By reaction curve for a quarter decay ratio. • By on-line cycling experiment for quarter decay ratio. • By tuning rules using reaction curve and integral performance criteria.
Reaction Curve Reaction curve L Manual input y + + + - R
Model characterization by reaction curve • FOPDT (First Order Plus Dead Time) model • Fit 1
Model characterization by reaction curve • FOPDT (First Order Plus Dead Time) model • Fit 2
Model characterization by reaction curve • FOPDT (First Order Plus Dead Time) model • Fit 3
Integral performance indices • ISE : • IAE: • ITSE: • ITAE:
Tuning rules for optimal integral performance measures • Optimal tuning parameters are obtained via simulating a basic loop: • The results apply specifically to set-point change or to disturbance change. GL=GP
Tuning rules for optimal integral performance measures • The controller used is considered as of parallel and ideal form; • Parameters are Dimensionless groups, such as : KcKp, tR/t, tD/t;
Tuning rules for optimal integral performance measures • The resulted tuning parameters are fitted into the following forms: • The values of a and b are tabularized.
Model based tuning rules for optimal integral performance measures ---II • Optimal tuning parameters are obtained via simulating a basic loop: • The results apply specifically to set-point change or to disturbance change. GL=GP
Model based tuning rules for optimal integral performance measures ---III • The resulted tuning parameters are fitted into the following forms: • The values of a and b are tabularized.
Remarks on tuning rules with integral performance indices: • Remember that conversions between a series PID controller and the parallel PID controller is necessary in order to use the tuning rules. • The tuning parameters for disturbance change will be too aggressive when controlling a set-point change. The reverse happens in using set-point tuning parameters to disturbance regulation. • No significance in difference among rules of different integral criteria.
Late methods • Method of Synthesis • Using IMC tuning (internal model control ) or other model based rules • Using ATV test to characterize the process dynamics.
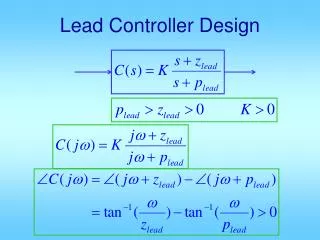
Direct synthesis method • Specify desired closed-loop transfer function. • Derive PID controller follows. • Tuning parameters are directly synthesized. • Exactly PID controller form applies to FOPDT or SOPDT processes.
r y + Gc(s) Gp(s) - y r Go(s) Specified to meet requirement r y H(s)
In order to be implementable, the reference H(s) should: • not allow to be assigned as “1”, in other words, a system can not be perfect in control. • contain all RHP zeros of Gp(s) • contain the dead time of Gp(s)
Example Choose:f = t3
Structure evolution from direct synthesis d y + r + + Gp(s) 1/Gp(s) H(s) - +
d y r + + H(s) Gp(s) Gp(s) 1/Gp(s) - + d r + y H(s) + 1/Gp(s) Gp(s) - + - Gp(s) Gp(s)
d y r + + 1/Gp(s) H(s) Gp(s) - + - Gp(s) C(s) d y r + + 1/Gp(s) H(s) Gp(s) - + - Gp(s) Gp(s)
d y r + Gp(s) C(s) - - Gp(s) Known as IMC d y r + + 1/Gp(s) H(s) Gp(s) - + C(s) - Gp(s)
d y r + C(s) Gp(s) - - Gp(s)