Download
1 / 1
10 likes | 83 Views
Automated 3D Tracking of Low-light Level Imagery using Compound Poisson MAP-MRF Labelling. 1. Outline:

E N D
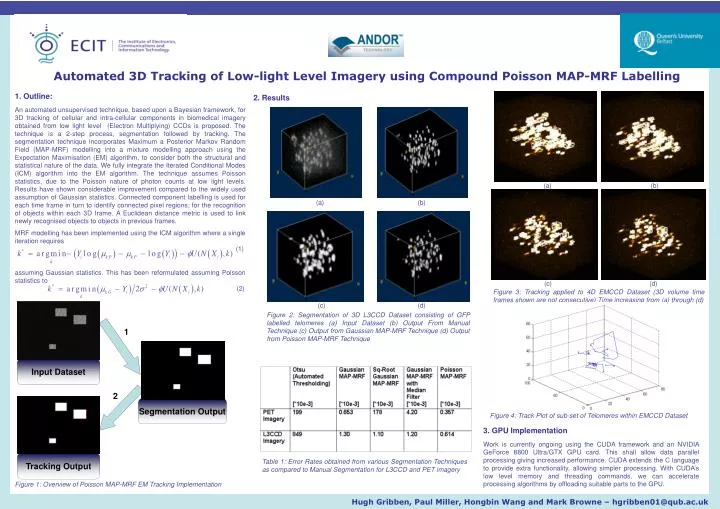
Automated 3D Tracking of Low-light Level Imagery using Compound Poisson MAP-MRF Labelling 1. Outline: An automated unsupervised technique, based upon a Bayesian framework, for 3D tracking of cellular and intra-cellular components in biomedical imagery obtained from low light level (Electron Multiplying) CCDs is proposed. The technique is a 2-step process, segmentation followed by tracking. The segmentation technique incorporates Maximum a Posterior Markov Random Field (MAP-MRF) modelling into a mixture modelling approach using the Expectation Maximisation (EM) algorithm, to consider both the structural and statistical nature of the data. We fully integrate the Iterated Conditional Modes (ICM) algorithm into the EM algorithm. The technique assumes Poisson statistics, due to the Poisson nature of photon counts at low light levels. Results have shown considerable improvement compared to the widely used assumption of Gaussian statistics. Connected component labelling is used for each time frame in turn to identify connected pixel regions; for the recognition of objects within each 3D frame. A Euclidean distance metric is used to link newly recognised objects to objects in previous frames. 2. Results (a) (b) (a) (b) MRF modelling has been implemented using the ICM algorithm where a single iteration requires (1) assuming Gaussian statistics. This has been reformulated assuming Poisson statistics to (2) (c) (d) Figure 3: Tracking applied to 4D EMCCD Dataset (3D volume time frames shown are not consecutive) Time increasing from (a) through (d) (c) (d) Figure 2: Segmentation of 3D L3CCD Dataset consisting of GFP labelled telomeres (a) Input Dataset (b) Output From Manual Technique (c) Output from Gaussian MAP-MRF Technique (d) Output from Poisson MAP-MRF Technique 1 Input Dataset 2 Segmentation Output Figure 4: Track Plot of sub-set of Telomeres within EMCCD Dataset 3. GPU Implementation Work is currently ongoing using the CUDA framework and an NVIDIA GeForce 8800 Ultra/GTX GPU card. This shall allow data parallel processing giving increased performance. CUDA extends the C language to provide extra functionality, allowing simpler processing. With CUDA’s low level memory and threading commands, we can accelerate processing algorithms by offloading suitable parts to the GPU. Tracking Output Table 1: Error Rates obtained from various Segmentation Techniques as compared to Manual Segmentation for L3CCD and PET imagery Figure 1: Overview of Poisson MAP-MRF EM Tracking Implementation Hugh Gribben, Paul Miller, Hongbin Wang and Mark Browne – hgribben01@qub.ac.uk