Download
1 / 21
210 likes | 319 Views
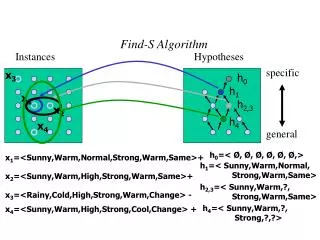
Linear Time Algorithm to Find All Relocation Positions for EUV Defect Mitigation. Yuelin Du, Hongbo Zhang, Qiang Ma and Martin D. F. Wong ASPDAC‘13. Outline. Introduction Problem formulation Algorithm Experimental results Conclusion. Introduction.

E N D
Linear Time Algorithm to Find All Relocation Positions for EUV Defect Mitigation Yuelin Du, Hongbo Zhang, Qiang Ma and Martin D. F. Wong ASPDAC‘13
Outline • Introduction • Problem formulation • Algorithm • Experimental results • Conclusion
Introduction • With the current VLSI technology shrinking to sub-20nm, EUV lithography has become a leading candidate to replace the 193nm technology. • But, the absence of defect-free blanks in EUV mask fabrication,a methodology that is able to deal with defective blanks will be required
Problem formulation • Maximize the number of valid dies within the exposure field.
Problem formulation • Find the all feasible regions.
Algorithm • Blank Region Partition • Blank Region with No Effective Defect • Blank Region with Single Effective Defect • Blank Region with Multiple Effective Defect
Blank Region Partition • no part of the die can be shifted outside the exposurefield • Each defect has a unique impact range
Blank Region with No Effective Defect • The bottom left corner of the die is located within this region, no defect will locate within the die area, and hence all defect impact is completely mitigated.
Blank Region with Single Effective Defect • Step 1. Impacted Feature Extraction • Step 2. Impacted Feature Shrinking • Step 3. Shrunk Die Area Rotation and Shift
Impacted Feature Extraction • The width/height of 3’is equal to the width/height of 3 plus the width/height of the defect. • Impacted Feature: F2,F3
Impacted Feature Shrinking • In the second step, the impacted features and the impacted die area 3are shrunk by the size of the effective defect.
Shrunk Die Area Rotation and Shift • Therefore, the shrunk features in 3’’and the feasible regions in 3 are diagonally symmetric.
Blank Region with Multiple Effective Defect • The objective is to find the feasible regions to locate the die where all defects are covered by features simultaneously. • We first consider each defect separately • And the sets of feasible regions are intersected to obtain the final feasible region
Time Complexity Analysis • n: the number of features in the die.
Experimental result • We implement our algorithm using C++ on a workstation with an Intel Xeon E5620 2.40GHz CPU and 36GB memory • Then we carry out our experiments with a 11nm design • The defects size form 50nm to 200nm • The size of the exposure field is 10.4cm by 13.2cm.
Conclusion • In this paper we propose an efficient algorithm to find all layout relocation positions to place a valid die on a defective blank for defect mitigation. • By simple parallelism, the efficiency can be further improved.