Download
1 / 25
290 likes | 1.66k Views
Priority Inheritance and Priority Ceiling Protocols. L. Sha, R. Rajkumar, and J. P. Lehoczky, "Priority Inheritance Protocols: An Approach to Real-Time Synchronization", IEEE Transactions on Computers, Vol. 39, No. 9, Sept. 1990. Priority Inversion.

E N D
Priority Inheritance and Priority Ceiling Protocols L. Sha, R. Rajkumar, and J. P. Lehoczky, "Priority Inheritance Protocols: An Approach to Real-Time Synchronization", IEEE Transactions on Computers, Vol. 39, No. 9, Sept. 1990.
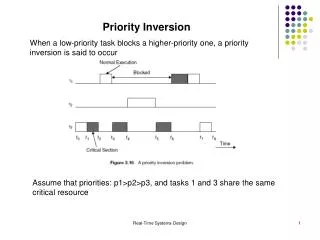
Priority Inversion • A high priority task is blocked due to a low priority task • How can it happen? • Mutex for shared resource access • Non-preemptive subsystem access • Network • System bus • Secondary storage
Mutual Exclusion via Semaphores • Ensure only one task/process is in the critical section • wait(S) to get access to semaphore S • signal(S) to release S • Example: producer consumer Producer() { . . wait(S) critical section /* create data & increment pointer */ signal(S) . . }
Priority Inversion Source of the figure: Chenyang Lu, Washington University Saint Louis
What really happened on Mars? • Repeated resets in the Mars Pathfinder • The Mars Pathfinder mission was widely proclaimed as "flawless" in the early days after its July 4th, 1997 landing on the Martian surface.... But a few days into the mission, not long after Pathfinder started gathering meteorological data, the spacecraft began experiencing total system resets, each resulting in losses of data. The press reported these failures in terms such as "software glitches" and "the computer was trying to do too many things at once".... • For a full story, visit http://research.microsoft.com/%7Embj/Mars_Pathfinder/Mars_Pathfinder.html
Pathfinder Incident • Classical priority inversion problem due to shared system bus! Source of the figure: Damir Isovic, Malardaren University, Sweden
Priority Inheritance • Inherit the priority of the blocked high priority task
Priority Inheritance Protocol (PIP) • If TL blocks a higher proirity task TH, priority(TL) ← priority(TH) • When TL releases a semaphore: • Return to its normal priority if it doesn’t block any task • Otherwise, set priority(PL) ← highest priority of the tasks blocking on a semaphore held by TL • Transitive • T1 blocked by T2: priority(T2) ← priority(T1) • T2 blocked by T3: priority(T3) ← priority(T1)
Chained Blocking: Problem of PIP In the worst case, the highest priority task T1 can be blocked by N lower priority tasks in the system when T1 has to access N semaphores to finish the execution! Source of the figure: Damir Isovic, Malardaren University, Sweden
Response Time Analysis of RMS with PIP • For RMS schedulability test, ensure that: • ∑ i=1, N (Ci/Ti + Bi/Ti) ≤ n(21/n - 1) , 1 ≤ i ≤ n • Biis thethe longest priority inversion time that could be experienced by Ti • Bi= CSi + CSi+1+ ...+ CSk where CSi, CSi+1, ..., CSk are the critical sections by which lower priority tasks could block Ti • Sufficient but not necessary because the priority due to contention for CS may not happen in reality
Priority Ceiling Protocol (PCP) • Avoid chained blocking • Guarantee a task is blocked by at most one lower priority task • No deadlock • Assumptions • Each task is associated with a fixed priority
PCP • Each semaphore has the fixed priority ceiling • ceiling(S) = highest priority among all the tasks that will request S • How it works: • Ti can access a semaphore S if • S is not already allocated to any other task; and • Priority of Ti is higher than the current processor ceiling = max(priority ceilings of all the semaphores allocated to tasks other than Ti)
PCP Ceiling(S1) = 1 (high) Ceiling(S2) = 2 (medium) Ceiling(S3) = 2 (medium) No chained blocking! Source of the figure: Damir Isovic, Malardaren University, Sweden
Schedulability of RMS with PCP • Consider blocking time: • ∑ i=1, N (Ci/Ti + Bi/Ti) ≤ n(21/n - 1) , 1 ≤ i ≤ n • Bi = max(CSi, CSi+1, ..., CSk) where CSi, CSi+1, ..., CSk are the critical sections that can block Ti
Task Arrival Patterns • Periodic • Sporadic • Aperiodic but minimum interarrival time is known • Worst case • Every sporadic job always arrives at its minimum interarrival time • Treat as periodic tasks • Utilization bound or response time analysis • If schedulable for the worst case, schedulable for all the other cases • Aperiodic • No limitations on interarrival times • Scheduling algorithms we have seen so far do not apply
Aperiodic Deadlines • Soft: Not much to do in terms of scheduling • Firm • Deadline & WCET are given • Start a firm deadline task only if it will finish by the deadline • Let’s discuss several hybrid scheduling algorithms that use RMS for periodic task scheduling • Several approaches to scheduling aperiodic tasks
Background Scheduling • Schedule periodic tasks first • Schedule aperiodic tasks only if there’s no periodic task Periodic tasks RMS CPU High priority queue Aperiodic tasks FCFS, EDF, etc. Low priority queue
Background Scheduling with RMS • Task set: T1(2, 6), T2(4,10) where Ti=(Ci, Pi) • Schedulable since 2/6 + 4/10 = 0.73 < 2(21/2-1) = 0.82 T1,1 T1,2 Idle T1 Schedule aperiodic tasks here 2 4 6 T2,1 T2 2 4 6 8 10
Polling Server • Use a periodic task to serve aperiodic tasks • Period: Ps • Capacity: Cs • Algorithm • Release the server at every period Ps • Serve any pending aperiodic task • Suspend itself, i.e., capacity = 0, if • It consumed Cs; or • There no pending aperiodic request • Replenish capacity, i.e., capacity = Cs, at the next period
Schedulability of Polling Server • Aperiodic tasks have no impact on periodic ones • There can be multiple servers • n periodic tasks & m polling servers are schedulable if Up + Us ≤ U(m+n) • Problem: If an aperiodic request arrives right after the server period, it has to wait until the next period → Long response time • Response time of an aperiodic request with execution time Ca is Ps + Ca/Cs Ps
Deferrable Server (DS) • Preserve the unused capacity until the end of the current period • Reduce response time to aperiodic requests • DS affects the schedulability of periodic tasks • DS schedulability ≠ RM
Priority Exchange Server • Server has the highest priority at the beginning • If there’s no aperiodic request to serve right now, preserve capacity for lower priority task’s execution time • Replenish the capacity at the next period
Optimal? • No optimal algorithm exists to minimize the response time! • Other servers with RMS • Sporadic server: Replinish capacity only after aperiodic request execution • Slack stealing: No periodic server, but slack stealer tries to steal time from periodic tasks