Download
1 / 49
500 likes | 633 Views
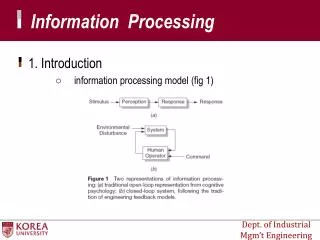
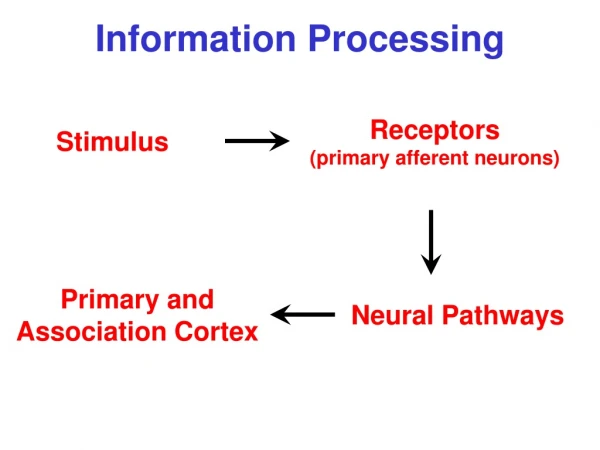
Consistent Visual Information Processing. Axel Pinz EMT – Institute of Electrical Measurement and Measurement Signal Processing TU Graz – Graz University of Technology pinz@emt.tu-graz.ac.at http://www.emt.tu-graz.ac.at/~pinz. “Consistency”. Active vision systems / 4D data streams.

E N D
Consistent Visual Information Processing Axel Pinz EMT – Institute of Electrical Measurement and Measurement Signal Processing TU Graz – Graz University of Technology pinz@emt.tu-graz.ac.at http://www.emt.tu-graz.ac.at/~pinz
“Consistency” • Active vision systems / 4D data streams • Multiple visual information • Imprecision • Ambiguity • Contradiction
This Talk: Consistency in • Active vision systems: • Active fusion • Active object recognition • Immersive 3D HCI: • Augmented reality • Tracking in VR/AR
AR as Testbed Consistent perception in 4D: • Space • Registration • Tracking • Time • Lag-free • Prediction
Agenda • Active fusion • Consistency • Applications • Active object recognition • Tracking in VR/AR • Conclusions
Active Fusion Simple top level decision-action-fusion loop:
Active Fusion (2) • Fusion schemes • Probabilistic • Possibilistic (fuzzy) • Evidence theoretic (Dempster & Shafer)
Probabilistic Active Fusion Nmeasurements, sensor inputs: mi Mhypotheses: oj , O = {o1, …, oM } Bayes formula: Use entropy H(O)to measure the quality ofP(O)
Probabilistic Active Fusion (2) Flat distribution: P(oj )=const. Hmax Pronounced distribution: P(oc ) = 1; P(oj ) = 0, j c H = 0 • Measurements can be: • difficult, • expensive, • N can be prohibitively large, … • Find iterative strategy to minimizeH(O)
Probabilistic Active Fusion (3) Start with A 1 measurements: P(oj|m1, … ,mA), HA Iteratively take more measurements: mA+1, … ,mB Until: P(oj|m1, … ,mB), HB Threshold
Summary: Active Fusion • Multiple (visual) information, many sensors, measurements,… • Selection of information sources • Maximize information content / quality • Optimize effort (number / cost of measurements, …) Information gain by entropy reduction
Summary: Active Fusion (2) • Active systems (robots, mobile cameras) • Sensor planning • Control • Interaction with the scene • “Passive” systems (video, wearable,…) • Filtering • Selection of sensors / measurements
Consistency • Consistency vs. Ambiguity • Unimodal subsets Ok • Representations • Distance measures
Consistent Subsets Hypotheses O = {o1 ,…, oM } Ambiguity: P(O) is multimodal Consistent unimodal subsets Ok O Benefits: • Application domains • Support of hypotheses • Outlier rejection
Distance Measures Depend on representations, e.g.: • Pixel-level SSD, correlation, rank • Eigenspace Euclidean • 3D models Euclidean • Feature-based Mahalanobis, … • Symbolic Mutual information • Graphs Subgraph isomorphism
Mutual Information Shannon´s measure of mutual information: O = {o1 ,…, oM } A O, B O I(A,B) = H(A) + H(B) – H(A,B)
Applications • Active object recognition • Videos • Details • Tracking in VR / AR • Landmark definition / acquisition • Real-time tracking
Active Object Recognitionin Parametric Eigenspace • Classifier for a single view • Pose estimation per view • Fusion formalism • View planning formalism • Estimation of object appearance at unexplored viewing positions
Applications Active object recognition • Videos • Details Control of active vision systems • Tracking in VR / AR • Landmark definition / acquisition • Real-time tracking Selection, combination, evaluation Constraining of huge spaces
Landmark Definition / Acquisition What is a “landmark” ? corners blobs natural landmarks
Automatic Landmark Acquisition • Capture a dataset of the scene: • calibrated stereo rig • trajectory (by magnetic tracking) • n stereo pairs • Process this dataset • visually salient landmarks for tracking
Automatic Landmark Acquisition visually salient landmarks for tracking • salient points in 2D image • 3D reconstruction • clusters in 3D: • compact, many points • consistent feature descriptions • cluster centers landmarks
Unknown Scene Landmark Acquisition Real-Time Tracking
Real-Time Tracking • Measure position and orientation of object(s) • Obtain trajectories of object(s) • Stationary observer – “outside-in” • Vision-based • Moving observer, egomotion – “inside-out” • Hybrid • Degrees of Freedom – DoF • 3 DoF (mobile robot) • 6 DoF (head and device tracking in AR)
Outside-in Tracking (1) stereo-rig IR-illumination • wireless • 1 marker/device: • 3 DoF • 2 markers: 5 DoF • 3 markers: 6 DoF devices
Consistent Tracking (1) • Complexity • Many targets • Exhaustive search vs. Real-time • Occlusion • Redundancy (targets | cameras) • Ambiguity in 3D • Constraints
Consistent Tracking (2) • Dynamic interpretation tree • Geometric / spatial consistency • Local constraints • Multiple interpretations can happen • Global consistency is impossible • Temporal consistency • Filtering, prediction
Hybrid Inside-Out Tracking (1) Inertial Tracker • 3 accelerometers • 3 gyroscopes • signal processing • interface
Hybrid Inside-Out Tracking (2) • complementary sensors • fusion
Summary: Consistency in • Active vision systems: • Active fusion • Active object recognition • Immersive 3D HCI: • Augmented reality • Tracking in VR/AR
Conclusion Consistent processing of visual information can significantly improve the performance of active and real-time vision systems
Acknowledgement Thomas Auer, Hermann Borotschnig, Markus Brandner, Harald Ganster, Peter Lang, Lucas Paletta, Manfred Prantl, Miguel Ribo, David Sinclair Christian Doppler Gesellschaft, FFF, FWF, Kplus VRVis, EU TMR Virgo