Download
1 / 13
130 likes | 205 Views
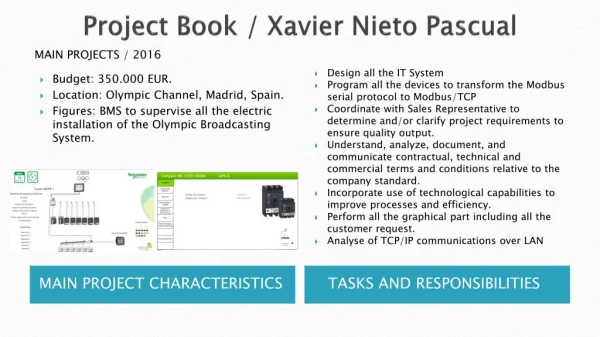
Freight Lift Bonus Project Work Book. force. height. F T. X. S. force. F T. Lift control simplified block diagram. height. X. +. Reference input. -. The following are 3 examples of calculation of our first design. In each, check out the mass, height, and the gain.

E N D
force height FT X
S force FT Lift control simplified block diagram height X + Reference input -
The following are 3 examples of calculation of our first design. In each, check out the mass, height, and the gain. For every mass and height combination, there is only a maximum gain that meet the velocity limit of 8 m/s and the overshoot limit of <= 1%. Hence, there is an arrival time for each mass- height combination. This is what our customer wants to know
Mass =250 kg Gain required=44.3 N/m Velocity cannot exceed 8 m/s If the lift is overdamped, it must be less than 0.5% from the set height to be counted as arrival time Height=50 m Force needed include mg term for the weight of the lift t=15.3 sec
Mass =500 kg Velocity is way below 8 m/s but can’t be higher because it would cause overshoot at arrival Gain required=29.2 N/m If the lift is overshot, it must be no more than 1% from the set height. The arrival time is the cross point Height=50 m t=18.8 sec
Mass =500 kg Note that this is the same 500 kg mass as in the previous slide, but maximum velocity can be used because it does not overshoot. Gain required=13.7 N/m Height=150 m t=64 sec
Example of Team Report on Freight Lift Project Report 1 3/26/2013 Team A: John Quincy Adams, John Hancock, Thomas Jefferson…
Executive Summary Mock only, please write your own We have studied a proportional controller design for the freight lift. We found that for each mass-height value combination, there is an optimum gain value, and there is a best arrival time. This relationship is dictated by the speed limit of 8 m/s and for the requirement of <= 1% overshoot. We have determined optimal gain and arrival time value mass from 250-1000 kg and height from 50-200 m.We do not find simple approximately linear relationship between travel time and height, owing to the fact that …. . The time can range up to 1xx seconds for h up to 200 m. The force required is approximately up to 1.3 ton (1300 kg), which is mostly to lift the weight of the heaviest load studied (1000 kg). We determine that the lift will need to have a weight sensor to measure the weight and a microcontroller to look up/interpolate the gain needed for the desired weight and height obtained from our tables. We think that this design is… (very important input here…) Therefore we propose to …
Relationship between mass-height and optimal gain, arrival time Place holder for 3 D plot Place holder for 3 D plot
Calibration value for Gain required By best fitting, we have obtained interpolation calibration of the gain required for mass height input. A micro-controller will be programmed to yield value of gain to set the lift engine. If the operator changes the destination while the lift is traveling mid air, the microcontroller will re-compute the gain and instantly change the gain setting, taking into account the lift current speed to ensure accurate arrival.
Analysis & Conclusion Per the customer requirement of fastest arrival and energy efficient, we think that this design is…. … We have not determined the energy consumed because we think that the design can be optimized for better performance for the next phase research.
Personal report Person 1: I did the gain-time data from the following: mass 500 kg, height: 100, 150, 200 Person 2: I did the gain-time data from the following: mass 750 kg, height: 500, 100, 150, 200 Person 3: I compiled the gain table and plot the 3 D plot (or a series of 2 D plots) Person 4: I synthesize the team analysis and write our opinion what we should do next Person 5: etc…