Download
1 / 21
210 likes | 444 Views
Artificial Muscle based on Flexinol motor wire. Scott Renkes Advisor: David Noelle. Goals. Design an actuator that mimics human muscle movements using Flexinol motor wire arranged in a bundle like structure

E N D
Artificial Muscle based on Flexinol motor wire Scott Renkes Advisor: David Noelle
Goals • Design an actuator that mimics human muscle movements using Flexinol motor wire arranged in a bundle like structure • Control the actuator with an artificial neural network that utilizes the properties of the motor wire • Design the system to be easy to interface, modular and user-friendly
Why a new actuator? • Replicate human movement • Reduce stress on user • Better human interaction • Refined force and velocity control of device • Utilize the function approximation of controller • Human like movement allows for better man machine integration • Less training time • Humanoid robots can more easily mimic humans • Robot more acceptable
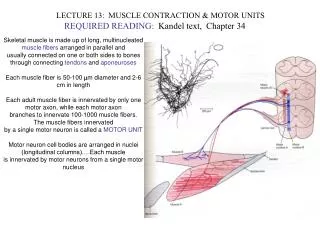
Flexinol • Shape memory alloy • Returns to memorized shape when stimulated • Heat stimulus • Only responds to stretching
Fibrous Bundled Structure • Flexinol motor wire to replace muscle fibers • Package wires similar to muscle • Flexinol/muscle fiber proportional elasticity • Similar force/length curves
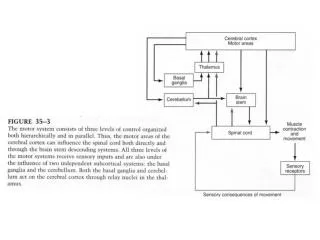
Recruitment • One bundle, one neuron • Weak fast, slow strong • Properties of motor wire allow for variety of activation • Neural Network Controller • Force feedback training • Inverse Dynamics
Feedback • Force feedback • Golgi tendon organ • Strain gauge • Length feedback • Muscle spindle • Approximation of Flexinol properties nawrot.psych.ndsu.nodak.edu/ .../Movement/Reflex.html
Neural Net Recruiting • Back Propagation Network • Neural Net Implementation • Computer • IC to Operation Voltage Amplifier • Force Controlled • Force feedback • Desired Force • Maximize F/t^2 • Ensure recruitment
Force Length Comparison • Muscle Force Length • See figure • Flexinol Force Length • Steeper slopes • Nature of Force Length Relationship • Tension • stretch
EMG Controller • Muscle Voltage vs Muscle Force • EMG signals represent muscle force • Neural Network for EMG pattern recognition • Scaled EMG of biscep as input • Desired force as ouput • Relative to min and max The green line is bicep voltage The blue line is tricep voltage 3 and 4 are unused channels
Mass production • Actuator is single wire • n loop • coil tension equalized • each end crimped to wire • Epoxy to attach “tendon” • Coated for biological applications • Portable battery and controllers
1 meter each Flexinol HT 375 Flexinol HT 200 Flexinol HT 100 Flexinol HT 037 Microprocessor X 2 Multiplexer Voltage Amplifier Wiring Epoxy Cable Total $22.95 $19.95 $17.95 $16.95 $50.00 $8.00 $10.00 $10.00 $8.00 $8.00 $171.80 Cost
Project Status • Completed work • Study properties of motor wire • Calculate efficiency of passive cooling • Develop Structure and Control for the device • Design test bed • Build actuator • Current Work • Finish neural network controller
Future Work • Examine biocompatibility • Calculate mass production costs • Evaluate production and market feasibility