Download

1 / 1
30 likes | 303 Views
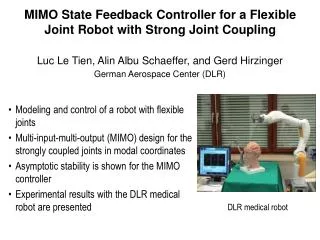
Robust Control using Recursive Design Method for Flexible Joint Robot Manipulator. Jong-Guk Yim, Je Sung Yeon, and Jong Hyeon Park Mechatronics Lab., Hanyang Univ., Seoul, Korea Sang-Hun Lee and Jong-Sung Hur Electro-Mechanical Research Institute Hyundai Heavy Industries Co.,Korea.

E N D
Robust Control using Recursive Design Method for Flexible Joint Robot Manipulator Jong-Guk Yim, Je Sung Yeon, and Jong Hyeon ParkMechatronics Lab., Hanyang Univ., Seoul, Korea Sang-Hun Lee and Jong-Sung Hur Electro-Mechanical Research Institute Hyundai Heavy Industries Co.,Korea • For flexible manipulators, we propose the robust controller using a recursive design method. • As the fictitious control, a nonlinear H-infinity control is designed in the sense of L2-gain attenuation. • The real robust control is designed recursively by using a Lyapunov’s second method.