Download

1 / 12
120 likes | 228 Views
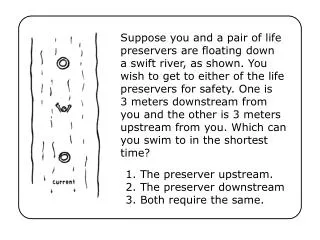
The Automated Life Preserver Launcher. Curtis Sand & Zach Byrne. Overview. Automatic System for launching life preservers when someone falls off a boat. In a real system: thermal cameras, an actual pneumatic life preserver launcher, victim would carry a panic beacon

E N D
The Automated Life Preserver Launcher Curtis Sand & Zach Byrne
Overview • Automatic System for launching life preservers when someone falls off a boat. • In a real system: thermal cameras, an actual pneumatic life preserver launcher, victim would carry a panic beacon • In our system: regular cameras, Nerf launcher, flashlight
Inspiration • Incorporate many interesting subsystems: • Serial Communication • Stepper motor/servo control • Image processing • Binocular range finding • What’s cooler than a Nerf turret?
Finding Bright Spots • Find the average location of bright pixels. • Effective for single light sources. • Fails for images with many lights or high overall brightness.
57° Calculating Distance • Second camera finds angle θ. • Fixed width w. • Limitations: • Camera FoV • Image resolution Theoretical Range Min: 0.78 meters Max: 32.6 meters
Aiming • Control range by adjusting launcher elevation. • Experimentally determined ranges. • Fit a parabola to the data.
Setbacks • Mechanical Issues • Moment of Inertia on the elevation motor. • Firing servo missing trigger. • Difficulty squaring cameras • Computer Issues • Instability of external RAM. • Unreliable connection to cameras. • Floating point bugs.
Results • Success!...Mostly. • Finds targets...sometimes. • Calculates distance...reasonably. • Calculates correct elevation...almost. • Acceptable Proximity to target...usually.