Download
1 / 40
460 likes | 867 Views
MECHANICS OF MATERIALS - I. AXIAL LOADING AND INDETERMINATE PROBLEMS COMPILED AND PREPARED BY: ENGR. DR. ZAHIRUDDIN SHAIKH. WHAT IS AXIALLY LOADED MEMBERS / STRUCTURES.

E N D
AXIAL LOADING AND INDETERMINATE PROBLEMS COMPILED AND PREPARED BY: ENGR. DR. ZAHIRUDDIN SHAIKH
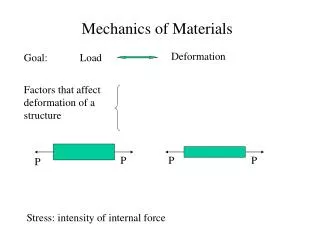
WHAT IS AXIALLY LOADED MEMBERS / STRUCTURES AXIALLY LOADED MEMBERS / STRUCTURES ARE THOSE ELEMENTS WHICH HAVE STRAIGHT LONGITUDINAL AXES AND ARE UNDER APPLICATION OF AXIAL FORCES, THAT IS ONLY IN ONE DIRECTION EITHER TENSILE OR COMPRESSIVE. EXAMPLES OF AXIALLY LOADED STRUCTURES CAN BE IN DIVERSIFIED DIRECTIONS AND ARE AS DIAGONALS IN TRUSSES CONNECTING RODS IN ENGINES CABLES IN BRIDGES COLUMNS IN BUILDINGS STRUTS IN AIRCRAFT ENGINE MOUNTS ------ MANY MORE CROSS-SECTIONS OF ABOVE-MENTIONED STRUCTURES MAY BE SOLID, HOLLOW, OR THIN-WALLED AND OPEN.
WHAT IS AXIALLY LOADED MEMBERS / STRUCTURES CROSS-SECTIONS OF ABOVE-MENTIONED STRUCTURES MAY BE SOLID, HOLLOW, OR THIN-WALLED AND OPEN. WHENEVER A STRUCTURE IS DESIGNED OR AN EXISTING STRUCTURE IS MODIFIED, NOT ONLY MAXIMUM STRESSES ARE CALCULATED BUT ALSO THE DEFLECTIONS IN THE STRUCTRE.
DESIGN, ANALYSIS AND OPTIMIZATION TWO WORDS OF “DESIGN” AND “ANALYSIS” ARE FREQUENTLY USED TOGETHER MEANING THE SAME THING. HOWEVER, IT IS LIKE THIS. THE WORD DESIGN PRECISELY MEANS THE DETERMINATION OF THE GEOMETRIC CONFIGURATION OF A STRUCTURE IN ORDER THAT IT WILL FULFILL A PRESCRIBED FUNCTION. WORD OF ANALYSIS IN MECHANICS OF MATERIALS IS USED TO MEAN THE CALCULATION OF PARAMETERS SUCH AS STRESSES, STRAINS, DEFLECTIONS AND LOAD-CARRYING CAPACITY. OPTIMIZATION IS THE TASK OF DESIGNING THE “BEST” STRUCTURE TO MEET A PARTICULAR GOAL, SUCH AS DESIGNING A STRUCTURE WITH THE LEAST WEIGHT.
AXIALLY LOADED MEMBERS / STRUCTURES IF WE ARE DESIGNING A NEW STRUCTURE OR ANALYSING AND/OR OPTIMIZING AN EXISTING STRUCTURE, DESIGNER MUST BE SEEKING DETERMINATION OF NOT ONLY THE MAXIMUM STRESSES IN THE STRUCTURES BUT ALSO THE DEFLECTIONS. DESIGN PARAMETERS REQUIRE BOTH MAXIMUM STRESSES AND THE DEFLECTIONS WITHIN LIMITS IN ORDER TO KEEP THEM SAFE AND FULFILL INTENDEDED FUNCTIONS. DEFLECTIONS NEED TO BE DETERMINED FOR BOTH STATICALLY DETERMINATE AND STATICALLY INDETERMINATE STRUCTURES. THE STRUCTURES IN WHICH IT IS POSSIBLE TO DETERMINE AXIAL FORCES IN THE MEMBERS AND REACTIONS AT THE SUPPORTS BY DRAWING FREE-BODY DIAGRAMS AND SOLVING ---------------- ARE KNOWN AS STATICALLY DETERMINATE STRUCTURES.
INDETERMINATE STRUCTURES AND THEIR SOLUTIONS THE STRUCTURES IN WHICH THE EQUATION OF STATIC EQUILIBRIUM ARE NOT SUFFICIENT AND ADDITIONAL EQUATIONS ABOUT DISPLACEMENTS OF THE STRUCTURES ARE NEEDED ARE KNOWN AS STATICALLY INDETERMINATE STRUCTURES. INDETERMINATE SOLUTIONS MUST BE SOLVED TO HAVE SAFE AND SOUND STRUCTURES. GENERALLY THERE ARE TWO METHODS TO ANALYZE SUCH STRUCTURES FLEXIBILITY METHOD STIFFNESS METHOD THESE TWO METHODS ARE COMPLEMENTARY TO EACH OTHER AND HAS THEIR ADVANTAGES. IF MATERIALS REMAIN WITHIN THEIR ELASTIC RANGES THESE ARE SUITABLE FOR MANY DIFFERENT KINDS OF STRUCTURES.
DEFLECTIONS OF AXIALLY LOADED MEMBERS LET US CONSIDER AGAIN A PRISMATIC BAR OF LENGTH “L” WITH AXIAL FORCES “P” LOADED UNDER TENSION. IF THE APPLIED FORCES ACT AT THE CENTROID OF THE CROSS-SECTION AND MATERIAL IS HOMOGENOUS, AXIAL STRESS AND STRAIN CAN BE CALCULATED BY THE SIMPLE EQUATIONS. IT IS ALSO ASSUMED THAT THE MATERIAL IS LINEARLY ELASTIC AND HENCE IS GOVERNED BY HOOKE’S LAW. ELONGATION IN THE BAR CAN BE DETERMINED BY THE FOLLOWING EQUATION: δ = PL/EA ………………… (1) THIS RELATIONSHIP DEFINES THAT ELONGATION IN A BAR OF HOMOGENOUS AND LINEARLY ELASTIC MATERIAL IS DIRECTLY PROPORTIONAL TO THE AXIAL FORCE AND LENGTH OF THE BAR AND INDIRECTLY PROPORTIONAL TO THE CROSS-SECTIONAL AREA AND MODULUS OF ELASTICITY.
DEFLECTIONS OF AXIALLY LOADED MEMBERS THE PRODUCT OF “E” AND “A” IS KNOWN AS THE AXIAL RIGIDITY OF THE BAR. SO THE ELONGATION IS DIRECTLY PROPORTIONAL TO LOAD (P) AND LENGTH (L) AND INVERSELY PROPORTIONAL TO AXIAL RIGIDITY (EA). THE SAME EQUATION CAN BE USED FOR A MEMBER IN THE CONDITION OF COMPRESSION. IT IS TO BE NOTED THAT ELONGATION IS TAKEN AS POSITIVE AND SHORTENING IS TAKEN AS NEGATIVE. IT CAN BE OBSERVED THAT A BAR IN TENSION IS ANALOGOUS TO AN AXIALLY LOADED SPRING. THE SPRING CONSTANT “k” IS DEFINED AS THE FORCE REQUIRED TO PRIDUCE UNIT ELONGATION ON THE SPRING, THAT k = P/δ. THE RECIPROCAL OF STIFFNESS IS KNOWN AS COMPLIANCE OF THE SPRING, THE DEFLECTION PRODUCED BY A LOAD OF UNIT VALUE.
SUMMATION OF INDIVIDUAL ELONGATIONS THE CHANGE IN LENGTH OF A PRISMATIC BAR LOADED ONLY AT THE ENDS CAN BE FOUND WITHOUT ANY DIFFICULTY BY THE PREVIOUS EQUATION. HOWEVER, ABOVE EQUATION CAN ALSO BE ADAPTED TO MORE GENERAL SITUATIONS SUCH AS THE BAR IS LOADED BY ONE OR MORE INTERMEDIATE AXIAL FORCES OR THE BAR IS CONSISTED OF PRISMATIC PARTS HAVING DIFFERENT X-SECTIONAL AREAS. FORCES CAN BE DETERMINED IN EACH PART OF THE BAR AND CONSEQUENTLY CHANGES IN LENGTHS, ELONGATION OR SHORTENING, CAN BE CALCULATED SEPARATELY. THE CALCULATED CHANGES IN LENGTHS MAY BE ALGEBRAICALLY ADDED TO OBTAIN THE TOTAL CHANGE IN THE ENTIRE LENGTH OF THE BAR.
SUMMATION OF INDIVIDUAL ELONGATIONS IN THIS WAY THE TOTAL ELONGATION AND SHORTENING CAN BE CALCULATED BY ADDING ALGEBRAICALLY THE INDIVIDUAL ELONGATIONS AND SHORTENINGS IN THE PRISMATIC BAR. TOTAL δ = δІ + ……........................+ Δδ ………. (2) SO IN GENERAL THE TOTAL CHANGE IN THE BAR OF SEVERAL PARTS HAVING DIFFERENT AXIAL FORCES AND X-SECTIONAL AREAS MAY BE OBTAINED FROM THE EQUATION OF THE FORM δ = Σ PL/EA …………………… (3) HOWEVER, WHEN THE AXIAL FORCE AND/OR THE X-SECTIONAL AREA VARIES CONTINUOUSLY ALONG THE AXIS OF THE BAR, THIS EQUATION DOES NOT HOLD TRUE.
SUMMATION OF INDIVIDUAL ELONGATIONS IN SUCH CASES TOTAL ELONGATION CAN BE FOUND BY CONSIDERING A DIFFERENTIAL ELEMENT (dx) OF THE BAR WITH VERY SMALL ELONGATION (dδ). IN OTHER WORDS TOTAL CHANGE CAN BE CALCULATED BY OBTAINING FOLLOWING EXPRESSION FOR A DIFFERENTIAL ELEMENT OF THE BAR AND INTEGRATING OVER THE ENTIRE LENGTH: dδ = Pdx/EA δ = ∫ dδ δ = ∫ Pdx/EA …………………….. (4) SUCH EQUATIONS CAN EASILY BE INTEGRATED ANALYTICALLY IF THE EXPRESSIONS FOR BOTH FORCE AND AREA ARE NOT TOO COMPLICATED.
SUMMATION OF INDIVIDUAL ELONGATIONS IN CASE EXPRESSIONS ARE NOT SIMPLE AND INTEGRATION IS NOT POSSIBLE THEN SOME NUMERICAL METHODS HAVE TO BE USED FOR EVALUATING THE INTEGRAL. THIS METHOD CAN YIELD QUITE ACCURATE RESULTS IF THE TAPER OF THE BAR IS SMALL, HOWEVER, IF THE TAPER IS HIGHER THEN MORE ACCURATE METHODS OF ANALYSIS HAVE TO BE USED. FOR EXAMPLE IF THE ANGLES BETWEEN THE SIDES IS 20 º, THE MAXIMUM ERROR IN THE NORMAL STRESS CALCULATED FROM THE EXPRESSION “P/A” IS ABOUT 3% AS COMPARED TO THE EXACT STRESS. ON THE OTHER END FOR SMALLER ANGLES, THE ERROR IS LESS.
STIFFNESS AND FLEXIBILITY STIFFNESS , DENOTED BY “k” OF A AXIALLY LOADED BAR IS DEFINED AS THE FORCE NEEDED TO PRODUCE A UNIT DEFLECTION (P/δ) IN THE BAR AND CAN BE CALCULATED BY THE FOLLOWING SIMPLE RELATIONSHIP: k = EA/L -------------------------- (5) ON THE OTHER HAND FLEXIBILITY DENOTED BY “f” IS DEFINED AS THE DEFLECTION PRODUCED DUE TO THE APPLICATION OF UNIT LOAD (δ/P), AND CAN BE CALCULATED IN THE SAME WAY AS CALCULATED THE STIFFNESS f = L/EA ……………………... (6) FLEXIBILITY IS RECIPROCAL OF THE STIFFNESS, AND THE TWO RELATIONSHIPS SHOW THAT STIFFNESS IS INDIRECTLY PROPORTIONAL TO THE LENGTH OF THE BAR.
STIFFNESS AND FLEXIBILITY ON THE OTHER HAND, FLEXIBILITY OF A BAR IS DIRECTLY PROPORTIONAL TO THE LENGTH AND RELATIONSHIP WITH MODULUS OF ELASTICITY AND CROSS-SECTIONAL AREA IS VICE VERSA. STIFFNESS AND FLEXIBILITY PLAY AN IMPORTANT ROLE IN THE ANALYSIS OF DIFFERENT TYPES OF STRUCUTRES. WHILE DESIGNING STRUCTURES WE MUST TAKE IT INTO ACCOUNT. FOR EXAMPLE IF YOU ARE GOING TO DESIGN A STRUCTURE, LIKE A BRIDGE, WHICH IS QUITE LONG, AT THIS POINT MECHANICS OF MATERIALS REQUIRES YOU CONSIDER THE FEXIBILITY OF THE STRUCTURE. INCREASE IN LENGTH WOULD SURELY INCREASE THE FLEXIBILITY OF STRUCTURE AND DECREASE ITS STIFFNESS. THEREFORE, WE HAVE TO ACCOMMODATE IT BY INCREASING X-SECTION OF THE STRUCTURE.
STATICALLY INDETERMINATE STRUCTURES THERE ARE TWO TYPES OF SITUATIONS FOR STRUCTURES WITH RESPECT TO DETERMINATION OF FORCES AND THEIR REACTIONS. IN FACT IT IS EASY TO ANALYZE AXIALLY LOADED STRUCTURES BY SIMPLE STATIC EQUILIBRIUM. IF IT IS POSSIBLE TO DETERMINE AXIAL FORCES IN THE STRUCTURES AND THE REACTIONS AT THE SUPPORTS BY DRAWING FREE-BODY DIAGRAMS AND THEN SOLVING EQUILIBRIUM EQUATIONS, SUCH STRUCTURES ARE KNOWN AS STATICALLY DETERMINATE STRUCTURES. ON THE OTHER HAND, STRUCTURES WHICH CAN NOT BE ANALYZED EASILY TO DETERMINE AXIAL FORCES AND THEIR REACTIONS AT THE SUPPORTS, AND NEED EQUILIBRIUM EQUATIONS SUPPLEMENTED BY THE ADDITIONAL EQUATIONS ABOUT DISPLACEMENT OF THE STRUCTURES, ARE KNOWN AS STATICALLY INDETERMINATE STRUCTURES.
STATICALLY INDETERMINATE STRUCTURES IN GENERAL THERE ARE FOLLOWING TWO TYPES OF METHODS TO ANALYZE AND SOLVE STATICALLY INDETERMINATE STRUCTURES: FLEXIBILITY METHOD STIFFNESS METHOD THESE TWO TYPES OF METHODS ARE COMPLEMENTARY TO EACH OTHER AND EACH ONE HAS ITS ADVANTAGES. IF THE MATERIALS REMAIN IN THEIR ELASTIC LIMITS, THESE METHODS ARE SUITABLE FOR MANY DIFFERENT TYPES OF STRUCTURES. LET US DISCUSS THESE TWO METHODS IN MORE DETAIL.
STATICALLY INDETERMINATE STRUCTURESBY FLEXIBILITY METBOD FLEXIBILITY METHOD SUPPOSE TWO ENDS OF A PRISMATIC BAR “AB” ARE FIXED TO RIGID SUPPORTS AND THE BAR IS AXIALLY LOADED BY THE FORCE “P” AT AN INTERMEDIATE POINT “C”. NOW TWO REACTIONS “Ra” & “Rb” WOULD BE DEVELOPED AT THE TWO ENDS. IF THE CONDITION OF EQUILIBRIUM IS OBSERVED IT IS EVIDENT THAT THESE TWO REACTIONS CAN NOT BE FOUND BY STATICS ALONE AS ONLY ONE FOLLOWING INDEPENDENT EQUATION OF STATIC EQUILIBRIUM EXISTS FOR THIS BAR WHICH HAS TWO UNKNOWN REACTIONS: P = Ra + Rb …………………. (7)
IN ORDER TO SOLVE THIS EQUATION AND CALCULATE THE REACTIONS ONE MORE EQUATION IS REQUIRED IN ORDER TO CALCULATE ONE OF THE REACTIONS; AND THAT CAN BE DEVELOPED FROM THE DEFLECTION OF THE BAR. LET US SUPPOSE THAT ONE OF THE REACTIONS IS STATICALLY REDUNDANT. IN FACT IT IS THE FORCE IN EXCESS OF THOSE THAT CAN BE OBTAINED BY STATICS ALONE. HERE “Ra” IS TAKEN AS THIS TYPE OF FORCE. IF “Ra” CAN BE FOUND EASILY THEN THE OTHER REACTION “Rb” CAN BE OBTAINED EASILY BY STATIC EQUILIBRIUM FROM THE PREVIOUS EQUATION, (7). BY REMOVING THE UNKNOWN REATION “Ra” FROM THE STRUCTURE, A STICTICALLY DETERMINATE AND STABLE STRUCTURE IS OBTAINED WITH TWO UNKNOWNS.
STRUCTURE AFTER REMOVING THE REATION “Ra” IS KNOWN AS RELEASED STRUCTURE OR THE PRIMARY STRUCTURE. NOW WE CONSIDER THE EFFECT OF LOAD P ON THE DISPLACEMENT OF POINT A IN THE RELEASED STRUCTURE. THIS DISPLACEMENT IS IN THE DOWNWARD DIRECTION AND THIS IS GIVEN BY δp = Pb/EA ……… (8) NOW WE VISUALIZE “Ra”, THE UNKNOWN QUANTITY, AS THE LOAD ACTING ON THE RELEASED STRUCTURE AND THE UPWARD DISPLACEMENT OF POINT “A” DUE TO “Ra” CAN BE CALCULATED BY THE FOLLOWING EQUATION: δr = RaL/EA …….. (9)
STATICALLY INDETERMINATE STRUCTURES IN THIS EQUATION THE REATION “Ra” IS A UNKNOWN QUANTITY AND WE ARE JUST GOING TO CALCULATE THE EXPECTED DISPLACEMENT DUE TO THE APPLICATION OF THIS REACTION. NOW WE HAVE EQUATIONS FOR BOTH TYPES OF DISPLACEMENTS AT THE POINT AND, THEREFORE, THE FINAL DISPLACEMENT OF POINT “A” DUE TO BOTH “P” AND “Ra” ACTING SIMULTANEOUSLY CAN EASILY BE FOUND BY SIMPLY COMBINING THE BOTH DISPLACEMENTS. NOW TAKING DOWNWARD DISPLACEMENT δp AS POSITIVE, FINAL DISPLACEMENT OF POINT “A” CAN BE OBTAINED AS FOLLOWS: δ = δp - δr …………... (10)
STATICALLY INDETERMINATE STRUCTURES AS THE ACTUAL DISPLACEMENT OF POINT “A” IS ZERO, THEREFORE, δr = δp OR RaL/EA = Pb/EA Ra = Pb/L ……….. (4) THE ABOVE EQUATION YIELDS THE VALUE OF Ra, THE REDUNDANT REACTION, WHICH WAS NOT KNOWN AND HAS NOW BEEN CALCULATED FROM THE DISPLACEMENT OF BAR. BY THE CONDITION OF EQUILIBRIUM Rb = P - Ra Rb = Pa/L ………… (5)
NOW THE BOTH REACTIONS “Ra” AND “Rb” OF THE BAR ARE KNOWN AND HENCE EQUATIONS CAN EASILY BE SOLVED. THIS METHOD IS CALLED FLEXIBILITY METHOD BECAUSE FLEXIBILITIES (L/EA) APPEAR IN THE EQUATION OF COMPATIBILITY. ANOTHER NAME FOR THIS METHOD IS FORCE METHOD AS FORCES ARE THE UNKNOWN QUANTITIES. THIS METHOD CAN BE USED FOR DIFFERENT TYPES OF STRUCTURES AND STRUCTURES HAVING MANY REDUNDANT FORCES. IN THIS SEMESTER WE WOULD BE DISCUSSING ONLY ELEMENTARY INDETERMINATE STRUCTURES WITH ONE REDUNDANT FORCE. IT IS TO BE NOTED THAT THESE EQUATIONS ARE VALID ONLY WHEN THE MATERIAL BEHAVES IN LINEAR ELASTIC MANNER.
PROCEDURE FOR SOLVING STATICALLY INDETERMINATE STRUCTURES BY FLEXIBILITY METHOD ONE OF THE UNKNOWN REACTIONS IS SELECTED AS REDUNDANT AND RELEASED FROM THE STRUCTURE BY REMOVING THE SUPPORT. THIS STRUCTURE NOW BECOMES STATICALLY DETERMINATE AND STABLE. THIS STRUCTURE IS THEN LOADED SEPARATELY BY THE ACTUAL LOAD P AND THE REDUNDANT ITSELF. THE DISPLACEMENTS CAUSED BY THESE TWO QUANTITIES ARE CALCULATED AND THEN COMBINED INTO AN EQUATION OF COMPATIBILITY OF DISPLACEMENTS (δR = δP).
THIS EQUATION OF COMPATIBILITY EXPRESSES A CONDITION THAT THE DEFLECTION (δ) AT END A IS EQUAL TO ZERO. BY SUBSTITUTING THE EXPRESSIONS FOR DISPLACEMENTS, THE REDUNDANT FORCE Ra CAN BE CALCULATED. FINALLY THE VALUE OF OTHER REDUNDANT FORCE Rb CAN ALSO BE CALCULATED.
DESIGN PROBLEM - I A HORIZONTAL BAR “AB”, ASSUMED TO RIGID, IS SUPPORTED BY TWO IDENTICAL WIRES “CE” AND “DF”. IF EACH WIRE HAS CROSS-SECTIONAL AREA “A”, DETERMINE TENSILE STRESS “σ1” AND “σ2” IN THE TWO WIRES. HINTS THE FREE-BODY DIAGRAM YIELDS THE FOLLOWING EQUATION OF MOMENT EQUILIBRIUM ABOUT POINT “A”. F1b + 2F2b – 3Pb = 0 F1b + 2F2b = 3P THE EQUUATION OF VERTICAL EQUILIBRIUM INTRODUCES THE REATION “R” AT THE FIXED END “A”. THIS EQUATION IS NOT SUFFICIENT TO FIND THE FORCES, HENCE ANOTHER EQUATION INVOLVING THE DEFORMATIONS OF WIRES IS NEEDED.
DESIGN PROBLEM - I NOW THE ELONGATIONS IN THE TWO WIRES ARE DENOTED AS “δ1” AND “δ2”. AS PER EQUATION OF COMPATIBILITY δ2 = 2δ1 NOW ELONGATIONS OF WIRES CAN BE CALCULATED BY THE FOLLOWING RELATIONSHIPS: δ1 = F1L/EA AND δ2 = F2L/EA F2 = F1 BY SUBSTITUTION, WE GET F1 = 3P/5 AND F2 = 6P/5 σ1 = F1/A = 3P/5A AND σ2 = F2/A = 6P/5A
DESIGN PROBLEM - II A CIRCULAR STEEL CYLINDER AND HOLLOW COPPER TUBE ARE COMPRESSED BETWEEN THE HEADS OF TESTING MACHINE. DETERMINE THE AVERAGE STRESSES IN THE STEEL AND THE COPPER AND THE AVERAGE COMPRESSIVE STRAIN THE VERTICAL DIRECTION DUE TO THE AXIAL FORCE “P”. HINTS P = Ps + Pc δs = PsL/EsAs AND δc = PcL/EcAc δs = δc PsL/EsAs = PcL/EcAc
DESIGN PROBLEM - II SOLVING SIMULTANEOUSLY THE TWO EQUATIONS WE GET Ps = (EsAs/EsAs+EcAc) P, Pc = (EcAc/EsAs+EcAc)P σs = Ps/As AND σc = Pc/Ac ε = P / (EsAs + EcAc)
STATICALLY INDETERMINATE STRUCTURESBY STIFFNES METHOD COMPARING WITH THE FLEXIBILITY METHOD, STIFFNESS METHOD FOR ANALYZING INDETERMINATE STRUCTURES DIFFERS IN THE SENSE THAT IN THIS METHOD DISPLACEMENTS RATHER THAN FORCES ARE CONSIDERED AS THE UNKNOWN QUANTITIES. HENCE THIS PARTICULAR METHOD IS ALSO KNOWN AS DISPLACEMENT METHOD. THE UNKNOWN QUANTITIES OF DISPLACEMENT ARE CALCULATED BY SOLVING EQUATIONS OF EQUILIBRIUM RATHER THAN EQUATIONS OF COMPATIBILITY. EQUATION OF EQUILIBRIUM HAVE COEFFICIENTS IN THE FORM OF STIFFNESS. METHOD OF STIFFNESS IS QUITE GENERAL AND IT COULD BE USED FOR A WIDE RANGE OF STRUCTURES IF THEIR BEHAVIOR IS EXPLAINABLE WITHIN LINEAR ELASTIC RANGE.
IN ORDER TO EXPLAIN THIS METHOD WE MAKE THE SAME ASSUMPTIONS AS WE MADE IN THE FLEXIBILITY METHOD EXCEPT A FEW. AGAIN WE HAVE PRISMATIC BAR “AB” SUPPORTED RIGIDLY AT TWO ENDS “A” AND “B” HAVING REACTIONS “Ra” AND “Rb” RESPECTIVELY. HOWEVER, IN THIS CASE THE VERTICAL DISPLACEMENT “δc” OF POINT C IN THE MIDDLE IS TAKEN AS THE UNKNOWN QUANTITY. THIS UNKNOWN QUANTITY IS THE JUNCTION OF THE TWO PARTS OF THE BAR. NOW THE AXIAL FORCES IN THE LOWER AND UPPER PARTS OF BAR, “Ra” AND “Rb” CAN BE OBTAINED BY THE EXPRESSIONS: Ra = EA / a δc and Rb = EA / b δc
IT CAN BE ASSUMED THAT “δc” IS POSITIVE DOWNWARD AND THUS IT PRODUCES TENSION IN THE UPPER PART AND COMPRESSION IN THE LOWER PART OF THE BAR. NOW CONSIDERING THE POINT “C” ISOLATED IN THE BAR AS A FREE-BODY DIAGRAM. IT CAN BE SEEN THAT LOAD “P” IS ACTING DOWNWARD, THE TENSILE FORCE “Ra” IN THE UPPER PART AND THE COMPRESSIVE FORCE “Rb” IN THE LOWER PART OF THE FREE BODY. AGAIN AS PER REQUIREMENTs OF STATIC EQUILIBRIUM Ra + Rb = P NOW SUBSTITUTING THE VALUES OF Ra (EA/ a δc) AND Rb (EA / b δc) IN THE PREVIOUS EQUATION FOLLOWING EQUATION IS OBTAINED:
EA δc /a + EA δc /b = P => δc = Pab / EAL, AS a + b = L AFTER CALCULATING THE VALUE OF “δc” AND SUBSTITUTING IT IN THE TWO EQUATIONS OBTAINED EARLIER, FOLLOWING TWO EXPRESSIONS FOR RESULTANT FORCES ARE OBTAINED: Ra = Pb/L AND Rb = Pa/L THESE ARE OF COURSE SAME AS WERE OBTAINED IN CASE OF FLEXIBILITY METHOD.
PROCEDURE FOR SOLVING STATICALLY INDETERMINATE STRUCTURES BY STIFFNESS METHOD FIRST OF ALL A SUITABLE DISPLACEMENT (δc ) HAS TO BE SELECTED AS THE UNKNOWN QUANTITY. NOW THE FORCES ACTING IN THE INDIVIDUAL PARTS OF THE BAR (Ra & Rb) ARE EXPRESSED IN TERMS OF THE SELECTED DISPLACEMENT. FORCES ARE THEN RELATED WITH EACH OTHER THROUGH THE EQUATION OF EQUILIBRIUM (P = RA + RB) EXPRESSIONS FOR UNKNOWN DISPLACEMENTS ARE SUBSTITUTED INTO THE EQUATION OF EQUILIBRIUM, GIVING AN EQUATION WITH ONLY THE DISPLACEMENT AS UNKNOWN.
NOTE THAT STIFFNESS ARE THE COEFFICIENTS OF DISPLACEMENT δc IN THIS EQUATION. EQUATION IS THEN SOLVED FOR UNKNOWN DISPLACEMENT AND AFTER THAT THE FORCES Ra AND Rb ARE FOUND FROM THE CALCULATED DISPLACEMENT. FINALLY THROUGH THE METHOD OF STIFFNESS, VALUES OF ALL FORCES ARE KNOWN AND DESIRED RESULTS ARE OBTAINED.
STIFFNESS OR FLEXIBILITY METHOD? IN FACT THE CHOICE BETWEEN THE STIFFNESS AND FLEXIBILITY METHODS IS QUITE ARBITRARY AS THERE IS LITTLE DIFFERENCE BETWEEN THESE TWO METHODS IN TERMS OF EFFORTS FOR CALCULATION. HOWEVER, OTHER THAN SIMPLE SITUATIONS, ONE METHOD MAY REQUIRE SIGNIFICANTLY FEVER CALCULATIONS THAN THE OTHER. AS A DESIGNER WE NEED FIND OUT WHAT VARIABLES ARE AVAILABLE AND WHAT SUPPOSITIONS CAN BE MADE. THE SOLUTION BY STIFFNESS METHOD PROCEEDS IN QUITE SIMPLE WAY, WHEREAS THE SOLUTION BY FLEXIBILITY METHOD BECOMES MUCH MORE COMPLEX AND REQUIRES THE SOLUTION OF THREE SIMULTANEOUS EQUATIONS. IN ORDER TO SOLVE MORE COMPLICATED PROBLEMS OF STRUCTURAL ANALYSIS WHERE COMPUTATION IS NEEDED, STIFFNESS METHOD IS PREFERRED TO THE OTHER METHOD.
PROBLEM A REINFORCED CONCRETE PEDESTAL OF HEIGHT “h” AND SQUARE CROSS SECTION WITH b=0.5 m ON EACH SIDE IS CONSTRUCTEDE WITH 12 STEEL REINFORCING BARS. EACH BAR HAS DIAMETER d= 25mm. THE PEDESTAL SUPPORTS COMPRESSIVE LOAD “P” APPLIED THROUGH A RIGID BEARING PLATE. ASSUMING LINEAR ELASTIC BEHAVIOUR , CALCULATE THE MAXIMUM PERMISSIBLE VALUE OF LOAD “P” IF THE ALLOWABLE STRESSES IN THE STEEL AND CONCRETE ARE 70 MPa AND 8MPa RESPECTIVELY. E FOR STEEL AND CONCRETE ARE 200 GPa AND 25 GPa RESPECTIVELY. HINTS Ps = EsAs δ / h AND Pc = EcAc δ / h P = Ps + Pc =
QUESTIONS AND QUERIES IF ANY! IF NOT THEN GOOD BYE SEE ALL OF YOU IN NEXT LECTURE ON TORSIONAL STRESS & STRAIN