Download

1 / 32
330 likes | 515 Views
TRENDS IN BPM SYSTEM DESIGN The ATF Damping Ring BPM Upgrade. Nathan Eddy Manfred Wendt Fermilab. Low- ε -Ring Workshop 2011 Heraklion , Crete, Greece. Contents. Part I (Manfred) Introduction BPM Pickup Design “Button-style” BPM Read-out Electronics Part II (Nathan)

E N D
TRENDS INBPM SYSTEM DESIGNThe ATF Damping Ring BPM Upgrade Nathan Eddy Manfred Wendt Fermilab Low-ε-Ring Workshop 2011 Heraklion, Crete, Greece
Contents • Part I (Manfred) • Introduction • BPM Pickup Design • “Button-style” BPM • Read-out Electronics • Part II (Nathan) • The ATF DR BPM System
BPM Building Blocks • BPM pickup • RF device, EM field detection, center of charge • Symmetrically arranged electrodes, (or resonant structure) • Read-out electronics • Analog signal conditioning • Signal sampling (ADC) • Digital signal processing BPM Pickup control system (LAN & FB) feedback bus (if applicable) position data Analog Signal Conditioning Digital Signal Processing Data Acquisition Power Supply & Misc. Trigger, Timing& RF Control • Data acquisition and control system interface • LAN & fast feedback • Trigger, CLK & timing signals timing, RF & CLK signals
Beam Structure • tbeam repeats with • trev in circular accelerators • Bunch intensities may vary • Bunch to bunch, within tbeam • “Missing” bunches • Or chance with time, e.g. • slowly due to lifetime • fast due to top-up injection trev Gaussian bunch: tbeam bunched beam tbunch time • Adapt BPM integration time • Single / multi-bunch • TBT, multiturn, narrowband, etc. • System BW: • Operation conditions may change • Particle species (e-, e+) • RF gymnastics, bunch patterns,…
BPM Characteristics &Applications • Measurement / integration time • Position resolution • Resolve an orbit difference (depends on the measurement time). • Linearity and accuracy • Absolute error of the reported beam position • BPM offset (zero-order correction coefficient) • BPM tilt (roll) -> x-y coupling • Dynamic range • Beam intensity independence (saturation / noise floor). • Reproducibility and long term stability • Reference “golden” orbit • Variety of applications beyond beam orbit measurements • Injection oscillations, betatron & synchrotron tunes, dispersion & beam energy, x-y coupling, beam optics, magnet alignment and errors, non-linear field effects, etc. • Machine commissioning (intensity).
BPM Offset & Tilt • BPM – quad alignment • Mechanical & “electrical” offsets • E.g. BBA procedure • Similar for BPM / quad tilt y beam position x quad offset BPM offset BPM Read-out (electr. offset) reported beam position
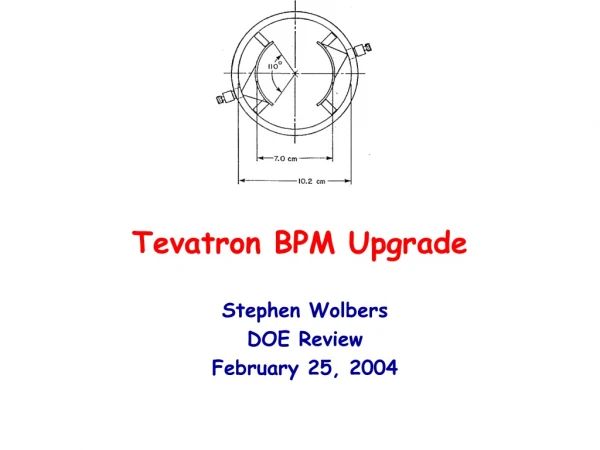
Broadband PU: Image Current Model • Broadband, e.g. “button” BPM pickup: • Difference and common mode signal components • Laplace problem solved for circular and elliptical cross-section • Image current density(cylindrical coordinates, ρ=r/R) • Electrode beam position sensitivity • Two symmetric arranged electrodes • Example: • Sensitivity near center for ϕ = 300-> 3.43 dB/mm (R = 10 mm)-> 2.58 dB/mm (R = 20 mm)
BPM Pickup Position Characteristics Up UL (Up-Left) Electrode B UR (Up-Right) Electrode A • Solve the Laplace equation numerically for one electrode (2D cross-section) • Expansion of ϕUR by superposition using the symmetry of the pickup, e.g.: UR Right (Out) Left (In) DL (Down-Left) Electrode C DR (Down-Right) Electrode D Down B A C D
BPM Pickup Scaling • Rearrange horizontal and vertical potential arrays: • Fit the 2D polynomials, e.g. of 7th order (or look-up table) • The coefficients knn include the scaling of the pickup geometry • knn‘s are the same for horizontal and vertical in caseof horizontal / vertical symmetry of the BPM pickup electrodes. • As of the symmetry, even terms are ~0. • limit the fit to odd terms, e.g. ϕ, ϕ3, ϕ5, ϕ7. • k00is ~0, but reflects the monitor offset, i.e. found e.g. by BBA, and is usually different in horizontal and vertical plane. • k01 is the “monitor constant”, slope at the origin • BPM pickup scaling and non-linear field correction: • Iterate a few times:
Button BPM • Commercial UHV RF button feedthroughs, made to specs • RF properties (numerical simulation) • Environmental requirements • Compact construction • Installation, tolerances, cabling • Other button load impedance, than Rload= 50 Ω?
Coupling Impedance • Longitudinal coupling impedance • Additional effects due to the annual button-ground gap • TE11 gap waveguide resonance at: • Try to minimize wake potential: • Reduce rbutton • Minimize wgap
Read-out Electronics A-Electrode Analog Signal Conditioning • Typical BPM read-out scheme • Pipeline ADC & FPGA • 14-16 bit, 100-300 MSPS, >70 dB S/N • Separate analog signal processing for the channels • Analog down-converter if undersampling is not applicable. C BPF Att BPF LPF B A Ctrl LO D B, C, D Analog same as A raw MEMORY WB Σ CLK & Timing NB CIC FIR Coordinate Transformation A Data I-Channel ADC NCO 900 Q-Channel same as I
Some Remarks • Analog down-converter / signal conditioning • Defines the TD waveform / frequency band to be digitized. • May need to be located close to the BPM pickup(e.g. pickup input frequencies in the microwave range) • Analog down-conversion vs. undersampling!? • CLK jitter requirements • Linearity / dynamic range extension (attenuator / gain switching) • Needs calibration & gain correction system • Digital signal processing • FPGA vs. CPU processing?! • I-Q is only required if ADC CLK is not phase locked to fRF • Down-conversion to base-band, low frequency but not DC • Crawling phase • Coordinate transformation √I2+Q2 vs. rotation to I’?! • Key elements: Dynamic range (linearity) & statistics (sample-rate)! • Practical considerations, e.g. cabling, VME, xTCA, pizza-box, etc. signal Aerror tjitter
Typical Performance BSP-100 module(APS ANL) Libera Brilliance(@APS ANL) courtesy G. Decker
BPM Resolution vs. Beam Current • Observed at DAϕNE (INFN-LNF) • Libera and Bergoz BPM read-out electronics • Each point is averaged over 100 orbits ----: Bergoz system resolution : libera slow acquisition mode : Libera turn by turn mode : Libera turn by turn mode (decimated) courtesy C. Milardi
Automatic Gain Correction • Use calibration tone(s) • 714+ε MHz, 714-ε MHz • Reflected and/or thru BPM calibration signal • Inside analog pass-band • Separate DDC in NB mode • Error & correction signals: • Advice: • Two calibration tones need separate DDCs, or a“ping-pong” calibration tone workaround
Libera Crossbar Switch CAL Scheme Schematics of crossbar switch based BPM electronics from Istrumentation Technologies. Pat. No.: US2004/0222778 A1
The ATF Damping Ring tbunch 1 2 19 20 111 112 129 130 221 222 239 240 1 2 trev
BPM Hardware Overview 4 button BPM pickup Down Mix IF (15) 4 4 ATT BPF LPF PLL CTRL CAN Cal (~ 714) LO (729) beam CLK (64.9) beam position I Digital Receiver(VME) VME µP Motorola 5500 Timing(VME) TRG Q 714 INJ LAN 2.16 VME BUS
Analog Signal Processing • 4-ch. Analog downmixer • IN: 714, LO: 729.1, IF: 15.1 MHz • CAN-bus controlled gain, attenuator & cal system • Gain switchable, low-noise, high IP3 input gain stage • Image rejection (SSB) mixer • ~30 dB gain, ultralinear IF stage SSB Mixer Directional Coupler BPF LNA LNA LPF BPF LPF LNA ATT 0° IN OUT 714MHz 15.145 MHz CF: 714MHz BW: 10MHz G: 15 dB NF: 1dB 90° CF: 15.1 MHz BW: 4MHz G: 18 dB BW: 40 MHz BW: 800 MHz G: 14/-2 dB NF: 1dB Cal Tone Signal 0 - 28 dB 4 dB steps 1.6 dB loss LO 729.145 MHz
Generic Digitizer VME bus GATE FPGA Altera Cyclone III VME Drivers TRIGGER External Control TCLK SYNC IN 4x32M DDR2 SDRAM SYNC OUT AC passive ADC JTAG 8 Analog Inputs 4 Channels per Chip EPCS4 Interface ADC Oscillator CLK IN Clock Driver (PLL & DIV) Oscillator CLK OUT 8-Ch,14-bit, 125 MS/s VME Digitizer • 125 MSPS, 500 MHz BW • 4-ch serial ADC chips • 8-ch, AC passive (or DC active) • PLL/VCO CLK distribution • SNR > 72 dB (@50 MHz) • Ch-ChxTalk > 80 dB BLOCK DIAGRAM
ATF FPGA Block Diagram latch VME NB Sums 50Hz Σ 32 Registers reset VME NB Data 8 ch / NB Filter 1.4kHz output 16 Bits/ch 32 ch / DDR RAM NB Data TBT Data Raw Data ADC Input 14 Bits 71.4 MHz NB Gate VME TBT Data 8ch / TBT Filter WB Gate(s) VME Raw Data reset latch WB Gate(s) DAQ SM Ch delays (clocks) Gates in Turns VME IRQ Trigger NB Gate
ATF Narrowband Signal Processing NCO (sin, cos) 24 Bits Phase (~1 Hz) Select Significant Bits • Process 8 ADC channels in parallel up to FIR filter • Digitally Downconvert each channel into I,Q then filter I,Q independently • CIC Filters operating in parallel at 71.4MHz • Decimate by 17KSPS to 4.2KSPS output rate • 1 Serial FIR Filter processes all 32 CIC Filter outputs • 80 tap FIR (400 Hz BW, 500 Hz Stop, -100 db stopband) -> 1KHz effective BW • Decimate by 3 to 1.4 KSPS output rate -> ability to easily filter 50Hz • Calculate Magnitude from I,Q at 1.4KHz • Both Magnitude and I,Q are written to RAM • Also able to write I,Q output from CIC to RAM upon request I CIC 5 Stages R=17001 Bit Shift FIR (80 taps) LPF 500Hz Decimate 3 I X Q ADC Input 14 Bits 69 MHz DDC Q 16 Bits 16 Bits 1.4 KSPS 24 Bits 4.2 KSPS 20 Bits 4.2 KSPS - Denotes Peak Detectors to optimize scaling Calculate Magnitude
ATF Standard Operation Data • Trigger before beam injection (injection rep rate is ~1.5 Hz) • Beam in machine for ~1e6 turns (~450 msec) • Bunch RF is 714MHz with h=330, ADC clock 71.4MHz -> 33 ADC samples/turn • Gates specified in turns (need to account for filter delay/decimation for NB) • Data in digitizer boards is overwritten on each trigger • Note for WB readback (diagnostic and some TBT data) it will be necessary to use “snapshot” which insures synchronization & stores all data in snapshot buffer Trigger Beam CAL NB Gate WB Gate(s) Reset Latch IRQ Readout Readout IRQ
ATF TBT Study Data • Trigger before beam injection (injection rep rate is ~1.5 Hz) • Beam in machine for ~1e6 turns (~450 msec) • Bunch RF is 714MHz with h=330, ADC clock 71.4MHz -> 33 ADC samples/turn • Gates specified in turns (need to account for filter delay/decimation for NB) • Data in digitizer boards is overwritten on each trigger • Note for TBT readback it is necessary to use “snapshot” which insures synchronization & stores all data in snapshot buffer Trigger Beam No NB Gate WB Gate Reset Latch IRQ Readout
ATF Software Components VME Hardware Motorola 5500 µP Software (VxWorks) Control Control Class ATFBPMCAL Control VME ECAN-2 PMC (1x) Class CALBox Status Status CAN Status Sample Flash WB / NB Bucket Delay 714 Single/Multi-turn VME Timing K-TGF (1x) Turn Data INJ (BIS) Ethernet Class KTGF Control Diag. Mode EPICS IOC Sample Count 2.16 Bucket Delay Class ATFBPM 729 Turn Delay Interrupt CLK (64.9) TRG (Gate) Multi-turn A Configure Control VME Digitizer (12x) Orbit B Class ADC Pos/ Int Data I/Q Data Flash C Diagnostic D Interrupt
TBT Inj.: Dispersion Measurement • Use TBT data to fit the dispersion functions • Use nominal Dx to find the amplitude andphase start values, which best fit x_TBT. • Subtract the synchrotron oscillation from x_TBT,to find the actual dispersion function. Dispersion, horizontal Dispersion, vertical
Dispersion Measurement (RF) • Dispersion measurement using a frequency shift • Perform closed orbit measurements with Δf = -10 kHz • Reference orbit: average 50 data setsRF shifted orbit: average 15 data sets • Particle are now on the dispersion orbit ~ D dp/p, with dp/p ~ df/f <Dx> <Dy>* *note: in <Dy> the green line justconnects the measurement points
Dispersion Analysis (cont.) • Compare RF and TBT inj. dispersion measurements • Good agreement in the horizontal plane • BPMs 73 and 85 where disconnected • Still fair agreement in the vertical plane, having only little dispersion perturbation. ΔDx ΔDy
TBT Phase Analysis • Beam phase motion (synchrotron oscillation) results in an error on each button magnitude • Observed on the intensity (button sum) and varies bpm to bpm • In the ideal case where each channel is sampled at the same phase, this would not affect the position • Simulated beam signals with expected synchrotron oscillation (200 turn period) • We are looking into ways to minimize this effect – cable trims, fit correction
Narrowband Results (preliminary) • 250 Orbit measurements recorded over an 8 hour shift • Resolution estimated with split signal BPM and by SVD technique • 0.650 μm with split signal • 1.25 μm (6 SVD modes) • 0.660 μm (20 SVD modes) • Measurements where performed in low gain • Expect ~3 improvement • Need more investigations!
Summary & Final Remarks • Trend to digital signal processing, plus some analog electronics with integrated calibration / drift correction scheme. • Complex processing / math in the digital domain. • Very flexible by FPGA re-programming, however labor intensive! • ATF BPM system has been implemented using this scheme • Custom analog downmix module • Tailored to machine parameters • Integrated gain control and calibration • Custom digitizer • ADC locked to machine RF • Can customize signal processing to specific needs • CO, TBT, FFT, etc • EPICs software interface • ATF Installation complete at the end of 2010 • Initial commissioning successful • Beam studies to continue – BBA, Tilt -> low emmittance operation!