Download
1 / 57
771 likes | 2.73k Views
主題二、 微小振幅波理論 Small-Amplitude Wave Theory. 2.1 定義 - 名詞 & 座標系統 2.2 邊界值問題 - 理論推導及解答 2.2.1 前言 Introductions 2.2.2 理論推導 Formulations 2.2.3 理論解答 Solutions 2.2.4 波浪工程性質 (Engineering Wave Properties). L. (. T. ). H. a. x. t. or. (. ). h. (. ). h. x. ,. t. 2.1 定義 - 名詞 & 座標系統.

E N D
主題二、微小振幅波理論Small-Amplitude Wave Theory • 2.1定義-名詞 & 座標系統 • 2.2邊界值問題-理論推導及解答 • 2.2.1前言Introductions • 2.2.2 理論推導Formulations • 2.2.3理論解答Solutions • 2.2.4波浪工程性質(Engineering Wave Properties)
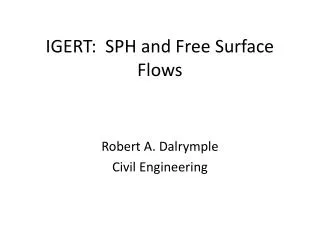
L ( T ) H a x t or ( ) h ( ) h x , t 2.1定義-名詞&座標系統 or 圖中所定義之簡單調諧前進波是在固定水深h中朝x方向移動,其中: H:波高 Crest:波峰 Trough:波谷 (x, t):(瞬時)水面_____位移,相對於平均水位 h:水深(平均水位至底床距離) MWL:靜水位(或平均水位) L:波長(wave length):連續波浪上任意兩相應_____水平間距 T:週期(wave period, 固定點處_________出現所需時間 H / L:波浪尖銳度(wave steepness) 垂直 位相 運動重複
2.1定義-名詞&座標系統 L ( T ) or H a x t or ( ) h ( ) h x , t C 圖中所定義之簡單調諧前進波是在固定水深h中朝x方向移動,其中: k:週波數(wave number) =2/L :角頻率(angular frequency)= 2/T、 a:振幅(wave amplitude) ac:波峰高度(or positive wave amplitude) at:波谷深度(or negative...) 就線性波浪理論 ac=at=a=H / 2 波峰或 (Wave Front):與波浪前進方向垂直之波峰連線 C:波速(phase velocity or wave celerity)C = L / T Cg:波群速度(group velocity) E:單位長度波浪能量(=1/8 gH2) E Cg:波能通量 (mean energy flux = wave power) Note :前進波或進行波 (progressive waves)其 波前線 向前傳遞且隨帶 與 動量 能量 波形 (但不一定有 ) 質量
2.1定義-名詞&座標系統 • 實際水波(water waves)是在不同滲透性的不規則底床上之黏滯性流體運動。 • 大多數情況下主要流體運動為,此乃因黏滯效果均集中於靠近 及 之薄邊界層中(thin boundary layer)。 • 水合理的視為不可壓縮性流體,故波浪中存在流速勢函數及流線函數(針對二維流場),但為簡化分析過程尚須做其它之假設。 非旋性 底床 水面
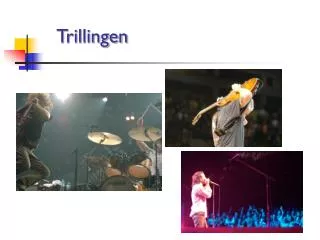
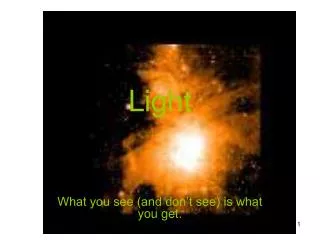
L KFSBC DFSBC z (x, y) H x (or t) LBC LBC h BBC Boundary value program specification for periodic water waves 2.2 邊界值問題-理論推導及解答【Boundary-Value Problems】 2.2.2理論推導 Formulations
2.2.2 理論推導 Formulations (一)、控制微分方程式(Governing Differential Equations) 假設:非旋轉性及不可壓縮性流體(Irrotatinal & Incompressible) 從(質量)連續方程式: 得到控制方程式即為 Laplace Equation (符號: ) 另外由於不可壓縮性(incompressible=ondivergent),故在2-D情況下 可代入下列式得 非旋轉性: 或旋轉性:
2.2.2理論推導 Formulations 評論 (Comments): a. for 2-D and 3-D flow fields b. for 2-D and 3-D (軸對稱,當流場其中一方向軸為對稱,較適 用於平面運動之波浪)。 c. 2 = 0 線性(因不牽涉任何乘積),故具有珍貴之 “線性相加”(superposition)特性,例如: 、 均滿足 2 = 0,則A+B 亦滿足 2 = 0,因此可任意加減各解答值以應用 於各種問題。
2.2.2 理論推導 Formulations (二)、邊界條件(Boundary Conditions,BC) ●運動邊界條件(或邊界上運動特性) Kinematic BC 任何邊界(不論是,e.g.或e.g.)都必須以滿足其上之特定物理意義,故在邊界上其水分子運動之條件稱為運動邊界條件。通常在任何界面或交界面上必然沒有穿越界面之流動,否則交界面不可能存在。若要用數學表示運動邊界條件,則可從描述邊界之方程式中推導得;例如:一表面形狀若以F(x, y,z, t) = 0表示,得知其表面可隨時間變化(如波浪),但總變化(即其形狀)不會隨時間變化(假設與表面一起運動),故: 固定 底床 自由 水面 流體速度
2.2.2 理論推導 Formulations (二)、邊界條件(Boundary Conditions,BC) ●運動邊界條件(或邊界上運動特性) Kinematic BC 流速分量 意義:垂直表面之與有關。故若表面速度不隨時間改變(倒固定邊界) 表面速度 F / t =0,則
2.2.2 理論推導 Formulations Figure 3.2 (a) Oscillating flow in a U-tube (b) details of free surface Examples:(Oscillating Flow in a U-tube) 因 Z=η(t) 故自由表面方程式為F ( z , t ) = z - ( t ) = 0,故 ,或即水分子速度必須與水面移動速度一致 ,否則水分子會脫離水面形狀。
2.2.2 理論推導 Formulations a.底床邊界條件 (Bottom Boundary Conditions BBC) w = 0 at z = -h(x) for水平底床 (horizontal bottom) 通解 (for a 2-D case):z = -h ,若底床不隨時間改變則 因 F(x, z) = z + h(x) = 0 [or z = -h(x)] 因 or (底床坡度) on z=-h(x) 如果是水平底床,即 dh / dx =0故 w = 0 on z=-hFor 3-D case, on z=-h(x, y)
2.2.2 理論推導 Formulations b.運動自由表面邊界條件(Kinematic Free Surface BC) KFSBC 同理,水面波形函數 F(x, y, z, t) = z - (x, y, t) = 0 因此 on z = (x, y, t) 因 故 或
2.2.2 理論推導 Formulations ●動力自由表面邊界條件(Dynamic Free Surface BC) 當不考慮表面張力,固定表面可以承受壓力變化但自由表面卻不能,尤其是air - water交界面更不能承受跨過交界面之壓力變化,只能隨壓力作用而反應只為保持之均勻性。因此所有自由邊界或交界面上都必須對壓力分佈做預設。 針對 DFSBC 之必備條件: 壓力 壓力在波形表面上是均勻的 即Bernoulli Eq. 通常對相對壓力(gauge pressure)而言,
2.2.2 理論推導 Formulations ●動力自由表面邊界條件(Dynamic Free Surface BC) Bernoulli Eq.在“反應性邊界”(responsive boundary)之應用: (1)coupled wind & waves, (2)forced waves, (3)free waves(本文) 以表示 DFSBC (若波長很短時必須包含表面張力) on z = (x, t)
2.2.2 理論推導 Formulations ●側面邊界條件(Lateral Boundary Conditions) F(x, z, t) = x - S(z, t) 則 就不透水固定邊界 而
2.2.2 理論推導 Formulations ●側面邊界條件(Lateral Boundary Conditions) 若右側為 a.Fixed beach:F(x, z)=z+h(x)=0 on z=-h(x) b.Radiation condition:邊界只有向外之波浪或進水槽之波浪,但此條件在物理上是無意義的。 對、週期性之波浪(periodic in space and time) 故LBC: (x,t) = (x+L,t) 且 (x,t) = (x,t+T) 無限遠處 入射 時 空
2.2.2 理論推導 Formulations L KFSBC DFSBC z (x, y) H x (or t) LBC LBC h BBC Boundary value program specification for periodic water waves ●2-D週期性波浪邊界值問題 BBC:w = 0 on z=-h KFSBC: on z=(x,t) DFSBC: on z=(x,t) PLBC: (x, t) = (x+L, t) 且 (x, t) = (x, t+T)
2.2.3 理論解答 Solutions G.E. or B.C. 分離變數法 • Linear Partial Diff. Eq.:之解可採用。 • Separation of Variables • Taylor's series(泰勒級數):
2.2.3 理論解答 Solutions 如果極小,則(Δx)2,(Δx)3將會很小,以致可忽略,因此: ,誤差在 以上。(泰勒級數近似,for很小) 由於KFSBC與DFSBC皆是在 處之B.C.,而事實上, 又是起始未知(priori unknown),一簡單方法表示此條件,即是將邊界條件在未知的處,以泰勒級數展開至已知之高程 處 對微小波浪而言, 小,因此 及 也均假設為小,因此他們之乘積更小,若我們忽略這些乘積項,即為線性結果,故:
(∵) for small 2.2.3理論解答 Solutions For small
解答,Solution: 從PLBC知, 一定是週期性的,在方向與時間t,特別是時間t。故可以任何簡諧函數(harmonic function)來表示,如: 以 為例,如果 ,則 。 (不必是I.C.)( ) 故 …….(*),將(*)代入: (一)從Laplace Eq. ( ) 2.2.3理論解答 Solutions
2.2.3 理論解答 Solutions 唯一條件 是兩者皆為constant,但正負號相反。 故 where (two O.D.E.s)
2.2.3 理論解答 Solutions Table 3.1可能之解 > 0 = 0 < 0
2.2.3 理論解答 Solutions (二)從P.L.B.C a).PLBC中不只對 periodic,也對 X(spatial),只有 時合理,即: 能滿足此條件者: 且 (或 ) 此外, 滿足 ,是線性的故適用superposition,因此取 即可。
2.2.3 理論解答 Solutions b).從 BBC (亦能滿足 )
由於微小波理論(物理現象): 2.2.3 理論解答 Solutions DFSBC (三)代入
2.2.3 理論解答 Solutions (四)從 KFSBC 得離散公式: dispersion equation 以 ,分別為 , ,可得 only one solution,即 已知,則存在有一值。 將 及代入且( ) 則 or
2.2.3理論解答 Solutions >> deep water 1 L 越大,c 越大 深海 解釋:海洋中,特別是中,波浪前進時,由於波浪是由許多不同( )之成分波組成,因此其波長及波速也不同,故根據dispersion equation,當這群波浪往前傳時,這些成分波會由於其速度不同逐漸彼此分離,並且深海中波長 L 越長者,C 速度越大,可傳遞越快。 【 :是波浪傳遞過程中唯一不變之性質。】 頻率 T
2.2.3 理論解答 Solutions (五)前進波Progressive Wave 以上所得之波浪解,實乃是 (駐波或重複波)型態: standing wave nodes : no motion of free surface : maximum of free surface anti-nodes 同理,考慮其他駐波 皆能滿足
2.2.3 理論解答 Solutions 利用線性相加(Linear Superposition) (可以Aψ1+Bψ2 A,B任意const.) D&D結果 前進波之Velocity Potential
2.2.3理論解答 Solutions Standing waves:coskx sinσt VS.Progressive wave:sin(kx-σt)差別? 因前進波時,η(x1,t)= η(x2,t)即暗示相位一致
線性偏微分方程式(Linear Partial Differential Eq.P.D.E.) 之解可應用分離變數法(Separation of Variables) 分離變數法:Taylor's Series:(Ippen,p2) 2.2.3理論解答 Solutions
2.2.3 理論解答 Solutions 即波浪向右運動(+x方向)(x2 > x1 ,t 2 > t1 )以速度C前進; 若是kx +σt → kx2 +σt2 = kx1 +σt1 即波浪向-x方向運動,(x2 < x1 ,t 2 > t1 )以速度C前進。
>> << 2.2.3理論解答 Solutions (六)深海與淺海特性: Hyperbolic Function 之近似解(Asymptotic Form) Dispersive
2.2.3 理論解答 Solutions 深海:kh>>1σ2 =gk tanh kh →σ2~gk → =(g/2π)T=5.12T2 (in ft) =1.56T2 (in m) 淺海:kh<<1 σ2 =gk tanh kh → ~gk*kh→T=σ/k=√(gh) σ≠f(σ): non-dispersive
2.2.3 理論解答 Solutions ◎試誤法(Try & Error) 解 =gk tanh kh →( h)/g=kh tanh kh 1st try:令 kh=a1 左式=const. 代入 右式= kh tanh kh → if 右式>左式 則kh= a2 > a1 右式<左式 則kh= a2 < a1 2nd ,3 rd try……令kh=a2 ,…….
2.2.4 波浪工程性質(Engineering Wave Properties) 前所導得之重複波與前進波波浪理論是解決許多工程問題之基礎 Ex.水分子運動特性(particle kinematics)及壓力場(pressure field)與作用物體上之波力有關。 (一)前進波之水分子運動 (Water particle Kinematics for Progressive Waves) ◎前進波水面位移(surface displacement) ◎流速勢函數(Velocity Potential)
◎水平方向: 速度 ◎垂直方向: 速度 2.2.4 波浪工程性質(Engineering Wave Properties)
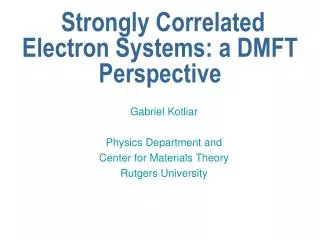
Direction of progressive wave propagation z x=L x=L/2 x u w w u 2.2.4 波浪工程性質(Engineering Wave Properties) • u & w 90°位相差(out of phase) (az)max u=(u)max when kx-σt=nπ,n=0,1,2,…波峰(crest) (ax)max w=(w)max when kx-σt=n+1/2π,n=0,1,2,…波谷(trough) • 垂直分佈:均是與雙曲線函數(hyperbolic function)cosh or sinkh有關係是: at bottom z = -h則k(h+z)=0 →u~1 ,w~0即在底床最小,向水面處 (向上)遞增。 ◎問:何者是波浪u , p特性? or
2.2.4 波浪工程性質(Engineering Wave Properties) (二)前進波水分子位移:(Particle Displacement)(非水面位移) 假設受波壓作用產生之水分子位移,其中心點是(x1,z1),任一刻位移 是(x1 +ζ,z1 +ξ)即位移量為△x=ζ,△z=ξ,分別可表示如下: 位移=速度*時間ζ(x1 ,z1 ,t)= u(x1 +ζ,z1 +ξ)dt ξ(x1 ,z1 ,t)= w(x1 +ζ,z1 +ξ)dt
2.2.4 波浪工程性質(Engineering Wave Properties) 按微小振幅波=>ζ,ξ微小量,因而
2.2.4 波浪工程性質(Engineering Wave Properties) Using σ2 = gktanhkh => 因而(ζ/A)2+(ξ/B)2=1 for any time => 橢圓方程式Equation of Ellipse長軸是A、短軸是B 事實上,從ζ,ξ公式中得知 Z=0,|ζ|及|ξ|=H/2 ,故沒有水分子在其上。
2.2.4 波浪工程性質(Engineering Wave Properties) 淺水波:In Shallow Water h /L <1/20 kh →0(cosh kh →1 sinh kh →kh) (因 L=cT and c=√(gh) for shallow water wave) A≠f(z1) & B=f(z1),if z→-h 、B→0
2.2.4 波浪工程性質(Engineering Wave Properties) 深水波(In deep water) h/L > 1/2 , kh>>1 圖4.3(D&D,P.83)shows the results for differant kh
(三)前進波波壓場(Pressure Field under a Progressive Wave) 從Bernoulli Eq. hydrostatic dynamic for z≦0 2.2.4 波浪工程性質(Engineering Wave Properties) 微小振幅波理論:(線性化)→→0 for any z≦0故前面所得之ψ代入
2.2.4 波浪工程性質(Engineering Wave Properties) 靜水壓(沒有波壓作用時) 波壓反應係數=f(z) z=0 ~ -h
If T known σ2=gk tanh kh 2.2.4 波浪工程性質(Engineering Wave Properties) (深海)應用波壓計量測η=>利用動水壓力 PD=ρg Kp(z=-h)η 由於 Kp(-h)~1/cosh kh 短週期波(T小)→ k大→1/cosh(kh)小 長週期波(T大)→ k小→1/cosh(kh)大 or kh>>1 (deep water) Kp(-h)~1/ekh kh<<1 (shallow water) Kp(-h)~1 從1/cosh kh的變化是否可推論,h影響及P→η之適用性,故應用底床波壓計量測η,在水深較大時可能量測不到任何值。 其次,非線性效應,由於隨著水深加大,非線性成份decay 較快,故底床波壓不能實際反應表面非線性波浪成份。
2.2.4 波浪工程性質(Engineering Wave Properties) (四)前進波之波能與波能傳遞 (Energy & Energy Propagation in Progressive Waves) (A)波能=位能(由於自由表面位移)+動能(水體中水分子運動) (PE) free surface displacement (KE) water particles movement PE= potential energy KE= kinetic energy 波能與波能傳遞→向岸傳遞時之變化;產生波浪所需之 (power);波能發電所可汲取之能量 功
:從底床至dm之質量中心(C.G.)高度 :從底床至dm之質量中心(C.G.)高度 2.2.4 波浪工程性質(Engineering Wave Properties) 位能(PE):一定質量(mass)抵抗重力重作離開平衡點之結果 a.當水面平息時,波浪位能是最小。 b.當水分子位移時,必須有外來能量供應造成,且位能亦增加 方法(一): dx寬之column 質量/單位寬度 (微小水柱)