Download
1 / 41
420 likes | 667 Views
Machine learning & category recognition. Cordelia Schmid Jakob Verbeek. Content of the course. Visual object recognition Robust image description Machine learning. Visual recognition - Objectives. Particular objects and scenes, large databases. …. Visual recognition - Objectives.

E N D
Machine learning & category recognition Cordelia Schmid Jakob Verbeek
Content of the course • Visual object recognition • Robust image description • Machine learning
Visual recognition - Objectives • Particular objects and scenes, large databases …
Visual recognition - Objectives • Object classes and categories (intra-class variability)
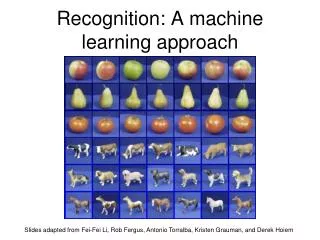
indoors person outdoors outdoors car enter outdoors drinking countryside exit through a door house person person kidnapping glass car building car crash car person car candle road people car street field car street car Visual object recognition
Visual recognition - Objectives • Human motion and actions
Difficulties: within object variations Variability: Camera position, Illumination,Internal parameters Within-object variations
Visual recognition • Robust image description • Appropriate descriptors for objects and categories • Statistical modeling and machine learning for vision • Selection and adaptation of existing techniques
Robust image description • Invariant detectors and descriptors • Scale and affine-invariant keypoint detectors
Matching of descriptors Significant viewpoint change
Ferrari et al. ECCV 2006 Contour features Basis: contour segment network edgel-chains partitioned into straight contour segments segments connected at edgel-chains’ endpoints and junctions [Ferrari, Fevrier, Jurie & Schmid, Pami’07]
Localization of “shape” categories Window descriptor + SVM Horse localization
Why machine learning? • Early approaches: simple features + handcrafted models • Can handle only few images, simples tasks L. G. Roberts, Machine Perception of Three Dimensional Solids, Ph.D. thesis, MIT Department of Electrical Engineering, 1963.
Why machine learning? • Early approaches: manual programming of rules • Tedious, limited and does not take into accout the data Y. Ohta, T. Kanade, and T. Sakai, “An Analysis System for Scenes Containing objects with Substructures,” International Joint Conference on Pattern Recognition, 1978.
Internet images, personal photo albums Movies, news, sports Why machine learning? • Today lots of data, complex tasks
Medical and scientific images Surveillance and security Why machine learning? • Today lots of data, complex tasks
Why machine learning? • Today: Lots of data, complex tasks • Instead of trying to encode rules directly, learn them from examples of inputs and desired outputs
Types of learning problems • Supervised • Classification • Regression • Unsupervised • Semi-supervised • Reinforcement learning • Active learning • ….
Supervised learning • Given training examples of inputs and corresponding outputs, produce the “correct” outputs for new inputs • Two main scenarios: • Classification:outputs are discrete variables (category labels). Learn a decision boundary that separates one class from the other • Regression:also known as “curve fitting” or “function approximation.” Learn a continuous input-output mapping from examples (possibly noisy)
Unsupervised Learning • Given only unlabeled data as input, learn some sort of structure • The objective is often more vague or subjective than in supervised learning. This is more of an exploratory/descriptive data analysis
Unsupervised Learning • Clustering • Discover groups of “similar” data points
Unsupervised Learning • Quantization • Map a continuous input to a discrete (more compact) output 2 1 3
Unsupervised Learning • Dimensionality reduction, manifold learning • Discover a lower-dimensional surface on which the data lives
Unsupervised Learning • Density estimation • Find a function that approximates the probability density of the data (i.e., value of the function is high for “typical” points and low for “atypical” points) • Can be used for anomaly detection
Other types of learning • Semi-supervised learning: lots of data is available, but only small portion is labeled (e.g. since labeling is expensive)
Other types of learning • Semi-supervised learning: lots of data is available, but only small portion is labeled (e.g. since labeling is expensive) • Why is learning from labeled and unlabeled data better than learning from labeled data alone? ?
Other types of learning • Active learning: the learning algorithm can choose its own training examples, or ask a “teacher” for an answer on selected inputs
Other types of learning • Reinforcement learning: an agent takes inputs from the environment, and takes actions that affect the environment. Occasionally, the agent gets a scalar reward or punishment. The goal is to learn to produce action sequences that maximize the expected reward (e.g. driving a robot without bumping into obstacles)
Visual object recognition - tasks • Image classification: assigning label to the image Car: present Cow: present Bike: not present Horse: not present …
Cow Car Visual object recognition - tasks Tasks • Image classification: assigning label to the image Car: present Cow: present Bike: not present Horse: not present … • Object localization: define the location and the category Location Category
bikes books building cars people phones trees Bag-of-features for image classification • Excellent results in the presence of background clutter
Bag-of-features for image classification SVM Extract regions Compute descriptors Find clusters and frequencies Compute distance matrix Classification [Nowak,Jurie&Triggs,ECCV’06], [Zhang,Marszalek,Lazebnik&Schmid,IJCV’07]
Spatial pyramid matching Perform matching in 2D image space [Lazebnik, Schmid & Ponce, CVPR’06]
Retrieval examples Query
Localization approach Histogram of oriented image gradients as image descriptor SVM as classifier, importance weighted descriptors
Unsupervised learning using Markov field aspect models[Verbeek & Triggs, CVPR’07] • Goal: automatic interpretation of natural scenes • assign pixels in images to visual categories • learn models from image-wide labeling, without localization • Per training image a list of present categories • Approach: capture local and image-wide correlations • Markov fields capture local label contiguity • Aspect models capture image-wide label correlation • Interleave: • Region-to-category assignments using Loopy Belief Propagation and labeling • Category model estimation Example scene interpretation of training image
Localization based on shape [Ferrari, Jurie & Schmid, CVPR’07] [Marzsalek & Schmid, CVPR’07]
Master Internships • Internships are available in the LEAR group • Object localization (C. Schmid) • Video recognition (C. Schmid) • Semi-supervised / text-based learning (J. Verbeek) • If you are interested send an email to us