Download
1 / 25
280 likes | 600 Views
Hue-Grayscale Collaborating Edge Detection & Edge Color Distribution Space. Jiqiang Song March 6 th , 2002. Introduction. Definition of “Edge” in an image Shape transition of intensity and/or color Meaning of edge Outline of objects Image structure

E N D
Hue-Grayscale Collaborating Edge Detection & Edge Color Distribution Space Jiqiang Song March 6th, 2002
Introduction • Definition of “Edge” in an image • Shape transition of intensity and/or color • Meaning of edge • Outline of objects • Image structure • An important feature for image segmentation & object detection
Part 1: Hue-Edge Collaborating (HGC) edge detection • Existing edge detection methods • Binary image • Grayscale image • Color image
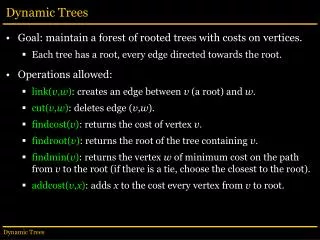
0 P2 -1 P2 -1 -1 P3 P3 P4 -1 0 P4 -1 P1 -1 P1 P P 4 8 P5 -1 P5 -1 • • 0 0 0 P8 P8 -1 P7 -1 -1 P7 0 P6 P6 -1 HGC Edge Detector— Binary edge detector • A foreground pixel ‘P’ (P=1) is an edge point if its convolution result does not equal zero. 8-connected edges 4-connected edges
HGC Edge Detector— Grayscale edge detector • Gradient operators • Sobel, Prewitt, Roberts • Second derivative operators • Zero-crossing, LoG • Others • Canny, SUSAN
R Multi-dimensional gradient calculation Color edges G Thresholding B R 1D Edge detection Color edges G 1D Edge detection Output fusion B 1D Edge detection HGC Edge Detector— Color edge detector • Multi-dimensional gradient methods • Output fusion methods
HGC Edge Detector— Why to design a HGC edge detector? • Grayscale edge detector >90% of real edges, fast. • Color edge detector more edges, slow. • Our application: video processing • Thousands of images in a 10 minutes long video (when sampling 3~4 images/second) • Color edge detector often over-detects edges.
HGC Edge Detector— Introduction of color models • RGB • R (red); G (green); B (blue) • Grayscale • Luminance, achromatic, 1 dimension • HSI – a perceptual color model • H (hue); S (saturation); I (intensity) • Others: YUV, HIQ, CIE(Lab),…
HGC Edge Detector— Grayscale vs. HSI • RGB Grayscale g = 0.299R + 0.587G + 0.114B; (0 g 1) • RGB HSI
HGC Edge Detector— Grayscale vs. HSI (continued) • The change of hue cannot be detected in grayscale space. • The noticeable change of intensity or saturation can be detected in grayscale space.
HGC Edge Detector— HGC edge detector Step 1: Generate Hue Edge Map (HEM) & Grayscale Edge Map (GEM) Step 2: Overdetected edge minimization Step 3: Output fusion
HGC Edge Detector— Hue Edge Map & Grayscale Edge map • Convert a sampled RGB video image into a hue map & a grayscale map. • Use Sobel operator to detect edge strength (gradient) in two maps. • Use a fuzzy threshold to generate edge maps.
HGC Edge Detector— Overdetected hue edge minimization ASSUME: a valuable edge point must have a certain connected length. • Extract hue edge points that are not grayscale edge points. • Use a run-length transform (RLT) to calculate the maximum connected length of an edge point in any direction. • Remove edge points that are not of desired connected length.
HGC Edge Detector— Output fusion • Merge HEM & GEM into a final Color Edge Map (CEM).
HGC Edge Detector— Performance comparison • Compared methods • A grayscale edge detector (Sobel) • HGC edge detector • A YUV color edge detector • Compared aspects • Speed • Edge completeness • Testing data: real-life video images
HGC Edge Detector— Speed comparison • HGC edge detector saves average 20% of processing time compared to the YUV color edge detector.
HGC Edge Detector— Comparison of edge completeness
HGC Edge Detector— Comparison of edge completeness (continued)
Part 2: Edge Color Distribution Space • Why introducing a Edge Color Distribution Space (ECDS) ? • 2D edge space is crowded. • Color is an important information to segment different objects. • Object discussed here is uniform-color object or textured object, not high-level object. • The discussed image is of width W, of height H, and of 256-level grayscale.
ECDS — Directional color operator • Get the directional average color of a point • Edge point (x, y, g): 0xW, 0yH, 0g255
ECDS — X-Y-G space ECDS • Quantization • ECDS • (x,y,g)(mx,my,gl) • Distance-weighted accumulation
ECDS — Characteristics of ECDS • Spatial relation of an object in the image is kept. • Objects of different colors are separated. • The edge of uniform-color object is continuous. • The edge of textured object is clustering.
ECDS — ECDS: a synthetic image
ECDS — ECDS: a video image