Download
1 / 1
10 likes | 116 Views
Polynomial number of polynomial-size ternary constraints. One global, exponential size constraint. Consistency Methods for Temporal Reasoning. Lin Xu and Berthe Y. Choueiry.

E N D
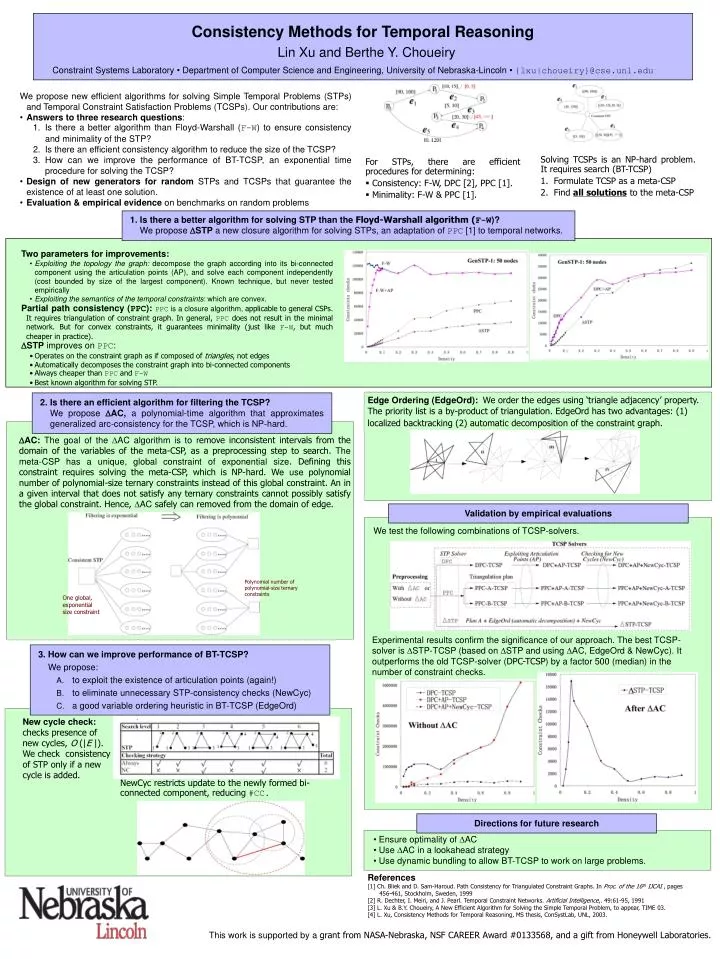
Polynomial number of polynomial-size ternary constraints One global, exponential size constraint Consistency Methods for Temporal Reasoning Lin Xu and Berthe Y. Choueiry Constraint Systems Laboratory • Department of Computer Science and Engineering, University of Nebraska-Lincoln • {lxu|choueiry}@cse.unl.edu • We propose new efficient algorithms for solving Simple Temporal Problems (STPs) and Temporal Constraint Satisfaction Problems (TCSPs). Our contributions are: • Answers to three research questions: • Is there a better algorithm than Floyd-Warshall (F-W) to ensure consistency and minimality of the STP? • Is there an efficient consistency algorithm to reduce the size of the TCSP? • How can we improve the performance of BT-TCSP, an exponential time procedure for solving the TCSP? • Design of new generators for random STPs and TCSPs that guarantee the existence of at least one solution. • Evaluation & empirical evidence on benchmarks on random problems Solving TCSPs is an NP-hard problem. It requires search (BT-TCSP) Formulate TCSP as a meta-CSP Find all solutions to the meta-CSP For STPs, there are efficient procedures for determining: • Consistency: F-W, DPC [2], PPC [1]. • Minimality: F-W & PPC [1]. 1. Is there a better algorithm for solving STP than the Floyd-Warshall algorithm (F-W)? We propose STP a new closure algorithm for solving STPs, an adaptation of PPC [1] to temporal networks. • Two parameters for improvements: • Exploiting the topology the graph:decompose the graph according into its bi-connected component using the articulation points (AP), and solve each component independently (cost bounded by size of the largest component). Known technique, but never tested empirically • Exploiting the semantics of the temporal constraints: which are convex. • Partial path consistency (PPC): PPC is a closure algorithm,applicable to general CSPs. It requires triangulation of constraint graph. In general, PPC does not result in the minimal network. But for convex constraints, it guarantees minimality (just like F-W, but much cheaper in practice). • STP improves on PPC: • Operates on the constraint graph as if composed of triangles, not edges • Automatically decomposes the constraint graph into bi-connected components • Always cheaper than PPC and F-W • Best known algorithm for solving STP. Edge Ordering (EdgeOrd): We order the edges using ‘triangle adjacency’ property. The priority list is a by-product of triangulation. EdgeOrd has two advantages: (1) localized backtracking (2) automatic decomposition of the constraint graph. 2. Is there an efficient algorithm for filtering the TCSP? We propose AC, a polynomial-time algorithm that approximates generalized arc-consistency for the TCSP, which is NP-hard. AC: The goal of the AC algorithm is to remove inconsistent intervals from the domain of the variables of the meta-CSP, as a preprocessing step to search. The meta-CSP has a unique, global constraint of exponential size. Defining this constraint requires solving the meta-CSP, which is NP-hard. We use polynomial number of polynomial-size ternary constraints instead of this global constraint. An in a given interval that does not satisfy any ternary constraints cannot possibly satisfy the global constraint. Hence, AC safely can removed from the domain of edge. Validation by empirical evaluations We test the following combinations of TCSP-solvers. Experimental results confirm the significance of our approach. The best TCSP-solver is STP-TCSP (based on STP and using AC, EdgeOrd & NewCyc). It outperforms the old TCSP-solver (DPC-TCSP) by a factor 500 (median) in the number of constraint checks. 3. How can we improve performance of BT-TCSP? We propose: • to exploit the existence of articulation points (again!) • to eliminate unnecessary STP-consistency checks (NewCyc) • a good variable ordering heuristic in BT-TCSP (EdgeOrd) New cycle check: checks presence of new cycles, O (|E |). We check consistency of STP only if a new cycle is added. NewCyc restricts update to the newly formed bi-connected component, reducing #CC. Directions for future research • Ensure optimality of AC • Use AC in a lookahead strategy • Use dynamic bundling to allow BT-TCSP to work on large problems. References [1] Ch. Bliek and D. Sam-Haroud. Path Consistency for Triangulated Constraint Graphs. In Proc. of the 16th IJCAI , pages 456-461, Stockholm, Sweden, 1999 [2] R. Dechter, I. Meiri, and J. Pearl. Temporal Constraint Networks. Artificial Intelligence,. 49:61-95, 1991 [3] L. Xu & B.Y. Choueiry, A New Efficient Algorithm for Solving the Simple Temporal Problem, to appear, TIME 03. [4] L. Xu, Consistency Methods for Temporal Reasoning, MS thesis, ConSystLab, UNL, 2003. This work is supported by a grant from NASA-Nebraska, NSF CAREER Award #0133568, and a gift from Honeywell Laboratories.