Download
1 / 1
10 likes | 100 Views
B A1 (t). B A2 (t). B B2 (t). B B1 (t). A 1. C. A 2. B 2. B 1. J B (t). J A (t ). …. …. C. A 1. A 2. B 2. B 1. “phantom” spins. Optimal State Encoding for Quantum Walks and Quantum Communication over Spin Systems.

E N D
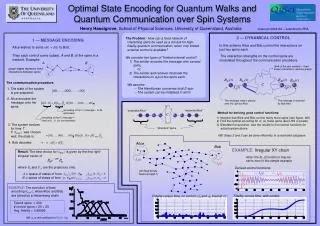
BA1(t) BA2(t) BB2(t) BB1(t) A1 C A2 B2 B1 JB(t) JA(t) … … C A1 A2 B2 B1 “phantom” spins Optimal State Encoding for Quantum Walks and Quantum Communication over Spin Systems Henry Haselgrove, School of Physical Sciences, University of Queensland, Australia Quant-ph/0404152 – submitted to PRA 2 — DYNAMICAL CONTROL In this scheme Alice and Bob control the interactions on just two spins each. The interaction strengths on the control spins are modulated throughout the communication procedure. • The Problem:- How can a fixed network of interacting spins be used as a conduit for high-fidelity quantum communication, when only limited external control is available? • We consider two types of “limited external control”: • 1) The sender encodes the message onto several spins, • or, • 2) The sender and receiver modulate the interactions on a just two spins each. • We assume: • -- The Hamiltonian conserves total Z-spin • -- The system can be initialised in all-|0i 1 — MESSAGE ENCODING Alice wishes to send®|0i + ¯|1ito Bob. They each control some subset, A and B, of the spins in a network. Example: A B (Bulk of the spin network— fixed known interactions, arbitrary graph) (graph edges represent fixed interactions between spins) The communication procedure: 1. The state of the system is pre-prepared: 2. Alice encodes the message onto her spins: The message state is placed onto this spin by Alice The message is received by Bob here (encoding of the|1imessage – to be optimised) “extended Bob” “extended Alice” Method for deriving good control functions: 1) Imagine that Alice and Bob control many more spins (see figure, left) 2) Find the optimal encoding for |1ion these spins (see LHS of poster) 3) Simulate the evolution. Use the results to find control functions for actual system above. NB: Steps 2 and 3 can be done efficiently, in a restricted subspace. (encoding of the|0imessage – fixed at|0…0i, for convenience) 3. The system evolves for time T. If |1ENCiwas chosen well, the state is: 4. Bob decodes: Alice Bob EXAMPLE: IrregularXY chain Result: The best choice for |1ENCiis given by the first right-singular vector of wherePBandPAare the projectors onto: Note: the B(·)(t) functions may be set to zero in this simple example JA(t) JB(t) Derived control functions: (All fixed bonds have strength 1) --- JA(t) --- JB(t) A ´space of states of form B ´space of states of form EXAMPLE: The evolution of best encoding |1ENCi, when Alice and Bob are joined by a Heisenberg chain Fidelity versus time, with control: Fidelity versus time, no control (JA and JB fixed at 1): Total # spins = 300 # control spins = 20 + 20 Avg. fidelity = 0.99999 NB:jis the coefficient of