Download
1 / 28
280 likes | 442 Views
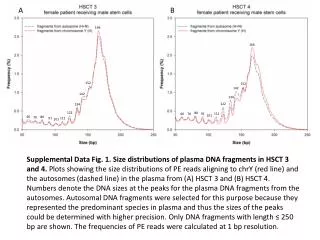
Using Feedback in MANETs: a Control Perspective. 101. 111. Todd P. Coleman colemant@illinois.edu University of Illinois DARPA ITMANET. TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: A A A A A A A A. Current Uses of Feedback. Theory

E N D
Using Feedback in MANETs: a Control Perspective 101 111 Todd P. Coleman colemant@illinois.edu University of Illinois DARPA ITMANET TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAAAAA
Current Uses of Feedback • Theory • Feedback modeled noiseless • Point-to-point: capacity unchanged • Significantly improved error exponents • Reduction in complexity • MANETs: Enlargement of capacity region
Current Uses of Feedback • Practice • Feedback is noisy, used primarily for • Robustness to channel uncertainty • Estimation of channel parameters • ARQ-style communication w/ erasures
Current Uses of Feedback • Practice • Feedback is noisy, used primarily for • Robustness to channel uncertainty • Estimation of channel parameters • ARQ-style communication w/ erasures • But: Burnashev-style “forward error correction+ARQ” schemes are extremely fragile w/ noisy feedback (Kim, Lapidoth, Weissman 07)
Applicability of Feedback in MANETs 101 111 • Instantiate network feedback control algorithms for MANETs • Develop iterative practical schemes for noisy feedback? • Coding w/ feedback over statistically unknown channels? • Develop fundamental limits of error exponents with feedback w/ fixed block length
Communication w/ Noiseless Feedback 0 0.25 0.50 0.75 1.00 00 01 10 11 0 1
Communication w/ Noiseless Feedback 0 0.25 0.50 0.75 1.00 00 01 10 11 0 1 Given an encoder’s Tx strategy, decoding is almost trivial (Baye’s rule)
Communication w/ Noiseless Feedback 0 0.25 0.50 0.75 1.00 00 01 10 11 0 1 Given an encoder’s Tx strategy, decoding is almost trivial (Baye’s rule) How do we select a (recursive) encoder strategy for an arbitrary memoryless channel?
A Control Interpretation of the Dynamics of the Posterior Coleman ’09: “A Stochastic Control Approach to ‘Posterior Matching’-style Feedback Communication Schemes”
A Control Interpretation of the Dynamics of the Posterior Coleman ’09: “A Stochastic Control Approach to ‘Posterior Matching’-style Feedback Communication Schemes”
A Control Interpretation of the Dynamics of the Posterior Coleman ’09: “A Stochastic Control Viewpoint on ‘Posterior Matching’-style Feedback Communication Schemes” uk Fk P(Fk|Fk-1, uk) reference signal Controller Fk-1 Z-1 Fw*
Stochastic Control: Reward Coleman ’09 Fw* Fk+1 D(Fw*||Fk+1) Reward at any stage k is the reduction in “distance” to target Xk Fk D(Fw*||Fk)
Maximum Long-Term Average Reward Coleman ’09
Maximum Long-Term Average Reward Coleman ’09 • (1),(2) hold w/ equality if: • a) Y’s all independent • b) Each Xi drawn according to P*(x)
Maximum Long-Term Average Reward Coleman ’09 • (1),(2) hold w/ equality if: • a) Y’s all independent • b) Each Xi drawn according to P*(x) • Horstein ’63 (BSC) • Schalwijk-Kailath ’66 (AWGN) • Shayevitz-Feder ‘07, ‘08 (DMC)
The Posterior Matching Scheme: an Optimal Solution Coleman ’09 • Next input indepof everything decoder has seen so far, withcapacity-achieving marginal distribution • No forward error correction. Adapt on the fly. Posterior matching scheme
The Posterior Matching Scheme: an Optimal Solution Coleman ’09 • Next input indepof everything decoder has seen so far, withcapacity-achieving marginal distribution • No forward error correction. Adapt on the fly. Posterior matching scheme
Implications for Demonstrating Achievable Rates Coleman ’09 0 1 0 1 1 0 1 0 1
Coleman ’09 Lyapunov Function 0 1 Posterior matching scheme: 0 1
Lyapunov Function (cont’d) Coleman ’09 0 1 1 0 1 0 1
Information Theory Control Theory Symbiotic Relationship Coleman ’09: “A Stochastic Control Viewpoint on ‘Posterior Matching’-style Feedback Communication Schemes” Converse Thms Give Upper Bounds on Average Long-Term Rewards for Stochastic Control Problem
Information Theory Control Theory Symbiotic Relationship Coleman ’09: “A Stochastic Control Viewpoint on ‘Posterior Matching’-style Feedback Communication Schemes” Converse Thms Give Upper Bounds on Average Long-Term Rewards for Stochastic Control Problem KL Divergence Lyapunov functions guarantee all rates achievable
Research Results with This Methodology • Interpret feedback communication encoder design as stochastic control of posterior towards certainty • Converse theorems specify fundamental performance bounds on a stochastic control problem related to controlling posterior. • An optimal policy implies the existence of a Lyapunov function, which is in essence a KL divergence • Lyapunov function directly implies achievability for all R < C Coleman ’09
Research Results with This Methodology • Interpret feedback communication encoder design as stochastic control of posterior towards certainty • Converse theorems specify fundamental performance bounds on a stochastic control problem related to controlling posterior. • An optimal policy implies the existence of a Lyapunov function, which is in essence a KL divergence • Lyapunov function directly implies achievability for all R < C Coleman ’09 Gorantla and Coleman ‘09: Encoders that achieve El Gamal 78: “Physically degraded broadcast channels w/ feedback“ capacity region in an iterative fashion w/ low complexity
Information Theory Control Theory New Important Directions this Approach Enables 101 111 • Develop iterative low-complexity encoders/decoders for noisyfeedback? Partially Observed Markov Decision Process
Information Theory Control Theory New Important Directions this Approach Enables 101 111 • Develop iterative low-complexity encoders/decoders for noisyfeedback? Partially Observed Markov Decision Process • Optimal coding w/ feedback over statistically unknown channels?Reinforcement learning from control literature
Information Theory Control Theory New Important Directions this Approach Enables 101 111 • Develop iterative low-complexity encoders/decoders for noisyfeedback? Partially Observed Markov Decision Process • Optimal coding w/ feedback over statistically unknown channels?Reinforcement learning from control literature • Develop fundamental limits of error exponentswith feedback w/ fixed block length Lyapunov function enables a fundamental Martingale condition
Information Theory Control Theory New Important Directions this Approach Enables 101 111 • Develop iterative low-complexity encoders/decoders for noisyfeedback? Partially Observed Markov Decision Process • Optimal coding w/ feedback over statistically unknown channels?Reinforcement learning from control literature • Develop fundamental limits of error exponents with feedback w/ fixed block length Lyapunov function enables a fundamental Martingale condition • Also:stochastic control approach provides a rubric to check tightness of converses via structure of optimal solution