Download
1 / 15
150 likes | 273 Views
By: David Gitz, EE, Robo-Chopper Lead Engineer. Quad-Rotor Autonomous Helicopter Project “ Robo -Chopper”. Topics:. System Description Capabilities and Applications Development Progress Request. System Description. Vehicle.

E N D
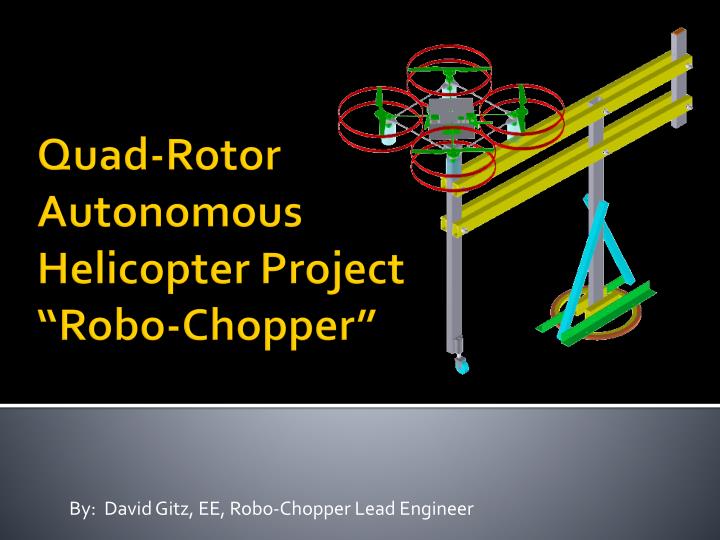
By: David Gitz, EE, Robo-Chopper Lead Engineer Quad-Rotor Autonomous Helicopter Project“Robo-Chopper”
Topics: • System Description • Capabilities and Applications • Development Progress • Request
Vehicle • Quad-Rotor design – Offers simpler control system with less moving parts than a normal helicopter and minor reduction in lift capacity
Vehicle • 2 “Brains”, 1 SoM Board and 1 Parallax Propeller • SoM handles waypoint navigation, mission planning, vehicle health. • Propeller handles PWM generation, Kalman Filter. • In the event of an in-air mishap, Propeller Controller can take over Vehicle land safely.
RCU • Custom PCB inside Xbox-360 Controller • Features Mode and Error Display, Vehicle Battery Indicator, Force-Feedback and 5 hours of continuous operation.
Test-Stand • Used for Vehicle Calibration and Capacity measurements • Able to Pivot vertically and rotate continuously • Power applied to Vehicle via Slip-Ring – No tangled wires
GCS and Interface • GCS offers extended range – up to 3 km • Interface designed in LabView • With Internet connection, Google Earth integration
System Interoperability • Using Xbee API Mode, Vehicle, GCS and RCU all talk to each other • RCU or GCS can extend flight range of Vehicle due to API mesh network.
Development Progress • Cost: 30% of material/part cost invested. • Tasks: 23% of defined tasks completed. • Currently in Phase 1 with limited development in Phase 2.
Request • Need People! • Computer Engineer • Mechanical Engineer • Project Manager • Technical Writer • Marketing/PR • Aerospace Engineer
Questions? • Contact: • davidgitz@gmail.com • www.thesciencedude.com