Download
1 / 3
30 likes | 141 Views
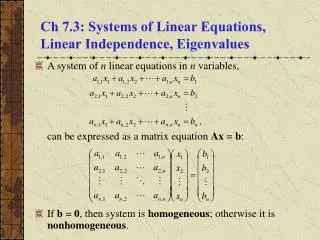
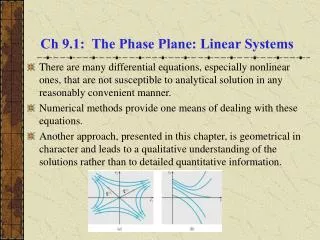
Phase planes for linear systems with real eigenvalues. SECTION 3.3. Summary. Suppose Y (t) = e t V is a straight-line solution to a system of DEs. What happens to Y (t) = (x(t), y(t)) as t ∞? How does your answer depend on the sign of ?

E N D
Phase planes for linear systems with real eigenvalues SECTION 3.3
Summary Suppose Y(t) = etV is a straight-line solution to a system of DEs. • What happens to Y(t) = (x(t), y(t)) as t ∞? • How does your answer depend on the sign of ? • Suppose dY/dt = AY has two real eigenvalues. Its general solution is Y(t) = k1etV1+k2etV2. • If both eigenvalues are negative, then the exponential terms go to 0 as t approaches infinity. The origin is the only equilibrium and it is a sink. • If both eigenvalues are negative, then the exponential terms go to infinity as t approaches infinity. The origin is the only equilibrium and it is a source. • If the eigenvalues are mixed, then the behavior is more complicated… It’s called a saddle.
Exercises • p. 287: 1, 3, 5 • p. 288: 17, 18 (use the DiffEq software)