Download
1 / 1
20 likes | 157 Views
Implementing a Swarm Robotics Scheme with Radio and Optical Communications. URECA! Recipient: Gregg Carpenter, Electrical Engineering Faculty Mentor: Dr. Jeff Frolik, School of Engineering. Abstract

E N D
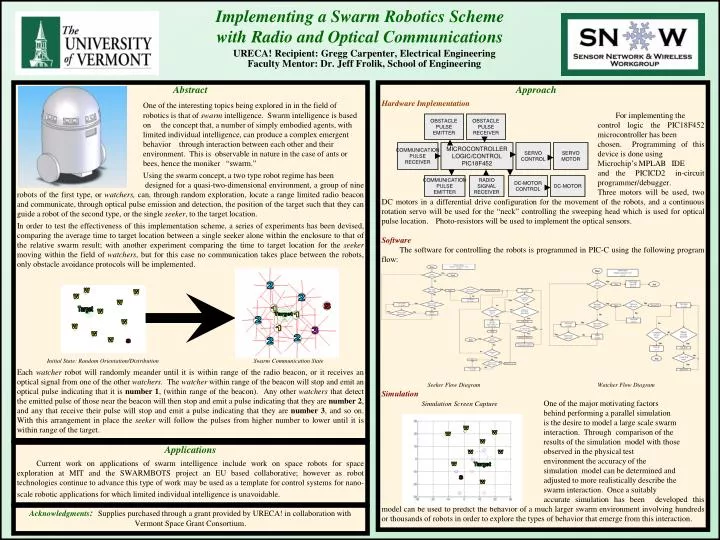
Implementing a Swarm Robotics Scheme with Radio and Optical Communications URECA! Recipient: Gregg Carpenter, Electrical Engineering Faculty Mentor: Dr. Jeff Frolik, School of Engineering Abstract One of the interesting topics being explored in in the field of robotics is that of swarm intelligence. Swarm intelligence is based on the concept that, a number of simply embodied agents, with limited individual intelligence, can produce a complex emergent behavior through interaction between each other and their environment. This is observable in nature in the case of ants or bees, hence the moniker “swarm.” Using the swarm concept, a two type robot regime has been designed for a quasi-two-dimensional environment, a group of nine robots of the first type, or watchers, can, through random exploration, locate a range limited radio beacon and communicate, through optical pulse emission and detection, the position of the target such that they can guide a robot of the second type, or the single seeker, to the target location. In order to test the effectiveness of this implementation scheme, a series of experiments has been devised, comparing the average time to target location between a single seeker alone within the enclosure to that of the relative swarm result; with another experiment comparing the time to target location for the seeker moving within the field of watchers, but for this case no communication takes place between the robots, only obstacle avoidance protocols will be implemented. Initial State: Random Orientation/DistributionSwarm Communication State Each watcher robot will randomly meander until it is within range of the radio beacon, or it receives an optical signal from one of the other watchers. The watcher within range of the beacon will stop and emit an optical pulse indicating that it is number 1, (within range of the beacon). Any other watchers that detect the emitted pulse of those near the beacon will then stop and emit a pulse indicating that they are number 2, and any that receive their pulse will stop and emit a pulse indicating that they are number 3, and so on. With this arrangement in place the seeker will follow the pulses from higher number to lower until it is within range of the target. Approach Hardware Implementation For implementing the control logic the PIC18F452 microcontroller has been chosen. Programming of this device is done using Microchip’s MPLAB IDE and the PICICD2 in-circuit programmer/debugger. Three motors will be used, two DC motors in a differential drive configuration for the movement of the robots, and a continuous rotation servo will be used for the “neck” controlling the sweeping head which is used for optical pulse location. Photo-resistors will be used to implement the optical sensors. Software The software for controlling the robots is programmed in PIC-C using the following program flow: Seeker Flow DiagramWatcher Flow Diagram Simulation Simulation Screen Capture One of the major motivating factors behind performing a parallel simulation is the desire to model a large scale swarm interaction. Through comparison of the results of the simulation model with those observed in the physical test environment the accuracy of the simulation model can be determined and adjusted to more realistically describe the swarm interaction. Once a suitably accurate simulation has been developed this model can be used to predict the behavior of a much larger swarm environment involving hundreds or thousands of robots in order to explore the types of behavior that emerge from this interaction. OBSTACLEPULSEEMITTER OBSTACLE PULSE RECEIVER COMMUNICATION PULSE RECEIVER MICROCONTROLLER LOGIC/CONTROL PIC18F452 SERVO CONTROL SERVO MOTOR COMMUNICATION PULSEEMITTER RADIOSIGNALRECEIVER DC-MOTORCONTROL DC-MOTOR 2 W W W 2 W S Target 1 W Target 1 2 W W 1 3 W 2 W 2 S W W W W Applications Current work on applications of swarm intelligence include work on space robots for space exploration at MIT and the SWARMBOTS project an EU based collaborative; however as robot technologies continue to advance this type of work may be used as a template for control systems for nano-scale robotic applications for which limited individual intelligence is unavoidable. W W W Target S W Acknowledgments: Supplies purchased through a grant provided by URECA! in collaboration with Vermont Space Grant Consortium.