Download

1 / 57
570 likes | 689 Views
Medium Access Control Protocol Design for Vehicle-Vehicle Safety Messages. Presented by: Amal Alhosban October 28 2009. The Authors . Qing Xu Tony Mak Jeff Ko Raja Sengupta University of California, Berkely. Content. Abstract Introduction

E N D
Medium Access Control Protocol Design for Vehicle-Vehicle Safety Messages Presented by: Amal Alhosban October 28 2009
The Authors • Qing Xu • Tony Mak • Jeff Ko • Raja Sengupta University of California, Berkely
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Abstract • Proposed Medium Access Control (MAC) Protocol designed for vehicle • Safety messages V-V • Developed a QoS model for safety messages • Each message has : • Range • Lifetime
Abstract • The protocol design based on rebroadcasting each message multiple times within its lifetime • Proposed Six different design variation • Derived equations, developed simulation tool to assess the performance of the design
Performance depend on: • Number of rebroadcast • Power • Modulation • Coding • Traffic
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Introduction Main purpose for this paper: Design wireless networks to enable vehicle safety systems The engineershave been designing vehicle system to • protect crash sec or less before • warn the driver • control the vehicle Active safety system
Active safety systems • Provide forward collision warning • Awareness about vehicles in blind spot • Conflicts at intersections But they share common needs: • The locations • Motions of its neighboring V We know the state using sensors Radar, laser Collision thread come from different directions radar looking forward, rear, right and left lane. The state of the V
CASS (authors 04) Cooperative Active Safety System Enabling active safety system by learning the state of neighbors V using GPS and Wi-Fi Why GPS & Wi-Fi?
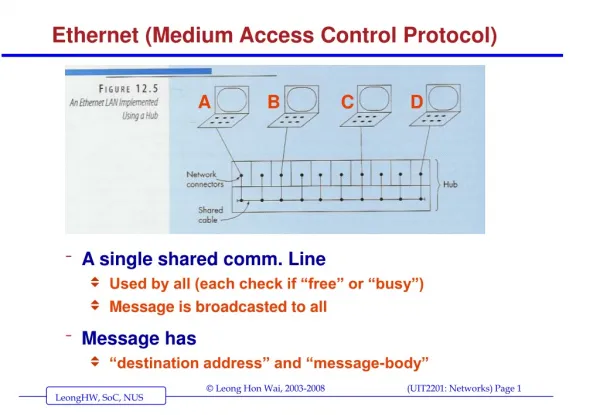
Safety • Academic response: VANET vehicular ad hoc networks • Government & industry • FCC federal communication commission safety messages will have priority access • IEEE create IEEE 802.11p, built priority for safety And others…
A Snapshot of Vehicle Neighborhood Map • 3 cars • Periodically transmit its GPS position, speed and heading (motion state) • Each car receive information and plot • Arrow in the middle the car • Arrowhead for direction
Network design The evaluation: • Driving on 4-8 lane freeway • 802.11a radio • 20 MHz channel To evaluate design we need to estimate : • The amount of data traffic • Pick QoS measures
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
When we Expect safety message? • Position • Speed • Heading • Turn signal • Break lights
The load depend on: • Safety message rate • Message size • Traffic density • Distance Because its wireless
CASS message rate • Safety message rate (1 – 10 Hz) • The vehicle transmits its motion state every 50 msec and the receiving vehicle can track smoothly • Moves 2 meter in 50 msec • When broadcast 1/500 too slow, driver reaction time every 500 msec • If the information delayed 500 msec the driver will see the threat before the system • In the system between 1/50 -1/500
CASS • Producing messages are independent • But may not true (example brakes)
CASS paket size • SAE J1746 encode vehicle location using 2 bytes • NTCIP using 5 bytes • CASS 100 – 400 • 80 network protocol header • 100 header and data compression • 170 location and motion
CASS broadcast • When V broadcast safety message its inform oncoming V about state of motion, the V far away should be told when it closer • How we determine near and far? • By having critical range (CR) for the message the V should receive the message before reach this range (stopped car in free way) • CR Depend on the content of message and its range
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
Describe the QoS model • CASS will not be fully designed and the levels of data traffic generated will not be known • Two QoS measures suitable when using CASS • (PRF) the probability of reception or reception failure (loss) • Channel busy time
PRF The probability a randomly chosen receiver at message range fails to receive a message within lifetime Lifetime = inverse of the rate (to reduce the number of dimensions 5 in the table)
Channel busy time (CBT) If two protocols deliver messages with same PRF but CBT of one lower than the other, we consider one with lower CBT T safety : total length of time period within T T : time period
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
In this paper • They didn’t use TDMA, FDMA or CDMA because difficult to allocate slot, codes and channels without centralized control • The design based on ALOHA and CSMA • MACA, MACAW, FAMA all uses (RTS/CTS) cannot use them for broadcast • Replaced in one ref by (RTB/CTB)
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Mac extension design • To maximize the probability (min PRF) • Care when repeat message (collision) • 6 variation on the reapeatetion • synchronous and asynchronous design • repetition with and without carrier sensing • fixed number and p-persistent repetition
The proposed protocol • Designed between logical link layer and MAC layer • Its role is to generate and remove repetitions • Implemented using NS2
Proposed protocol • Asynchronous Fixed Repetition (AFR) the number of repetitions k • Asynchronous p-persistent Repetition (APR) the number of repetitions k/n for n slots • Synchronous Fixed Repetition (SFR) • Synchronous p-persistent Repetition (SPR) • Asynchronous p-persistent Repetition with Carrier Sensing (APR-CS) • Asynchronous Fixed Repetition with Carrier Sensing (AFR-CS)
MAC Layer State Machine of the AFR-CS protocol Check channel status if busy If corrupted Pass to physical layer Check integrity
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Performance of AFR-CS Protocol as a Function of Interferer Number
PRF of SFR Protocol at Various Data Rates in the Nominal Setting: Analytical