Download
1 / 16
160 likes | 251 Views
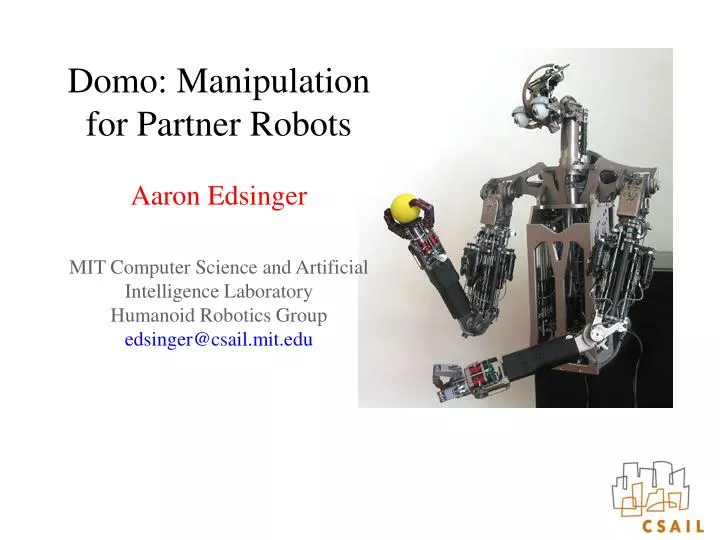
Domo: Manipulation for Partner Robots Aaron Edsinger MIT Computer Science and Artificial Intelligence Laboratory Humanoid Robotics Group edsinger@csail.mit.edu. Robots That Can Work Alongside Humans. Built for human environments Safety in the human workspace

E N D
Domo: Manipulation for Partner RobotsAaron EdsingerMIT Computer Science and Artificial Intelligence LaboratoryHumanoid Robotics Groupedsinger@csail.mit.edu
Robots That Can Work Alongside Humans • Built for human environments • Safety in the human workspace • Humanoid body to work with everday objects • Perform tasks that are important to people using natural strategies with everyday objects
Creating Robust Manipulation Interactions in Unstructured Environments • Let the body assist perception • Passive compliance and force control • Highly integrated behavior-based architecture • Perceptual prediction through efference-copy models • Learn task-relevant features of objects instead of using full 3D models
29 active degrees of freedom (DOF) • Two 6 DOF force controlled arms using Series Elastic Actuators • Two 6 DOF force controlled hands using SEAs • A 2 DOF force controlled neck using SEAs • Stereo pair of Point Grey Firewire CCD cameras • Stereo Videre STH-DCSG-VAR-C Firewire cameras • Intersense 3 axis gyroscope • Two 4 DOF hands using Force Sensing Compliant (FSC) actuators • Embedded brushless and brushed DC motor drivers • 5 Embedded Motorola 56F807 DSPs running a 1khz control loop • 4 CANBus channels providing 100hz communication to external computation. • 49 potentiometers, 7 encoders, 24 tactile sensors, 12 brushless amplifiers, 17 brushed amplifiers, 12 sensor conditioners embedded on-board • An estimated 500 fabricated mechanical components and 60 electronics PCBs • 12 node Debian Linux cluster running a mixture of C/C++/Python and utilizing the Yarp and pysense robot libraries. • Weight: 42lbs. Height: 34" tall. Arm span: 5' 6" Domo
Behavior Based Architecture Arm Behaviors Head Behaviors
Series Elastic and Force Sensing Compliant Actuators • Mechanically simple • Improved stability • Shock tolerance • Highly backdrivable • Low-grade components • Low impedance at high frequencies
Passive and Active Compliance Series Elastic Actuator Force based grasping
Exploit interaction forces at the hand as an additional perceptual modality Efference Copy Model Upper 4 DOF of each arm. Sensed joint torque Sensed joint angle Jacobian relates hand forces to joint torques
Sensed torque Bimanual interaction torque • Simplified inverse dynamic model of arm • Model predicts normally occurring torques during reaching • Use the prediction to amplify the salience of interaction torques (external and bimanual) Efference Copy Model External interaction torque Mass Acceleration torque Motor torque Inverse dynamics 0 Coriolis and Centrifugal Predicted torque Known (Commanded torque) Sensed torque Commanded torque Known (von Holst, 1973)
Detection of Self-Induced Hand Forces Interaction forces at hands are approximately equal and opposite Interaction forces present Interaction forces not present
Detection of Interaction Forces Ballistic reaching: prediction error Efference copy model generates torque prediction. Torque prediction errors drive visual attention system. External forces: prediction error
Learning About Tool Use • Motion feature points for tip detection • 3D position estimation using probabilistic model