Download
1 / 1
30 likes | 214 Views
P10029 : Process Development for Simulating and Controlling Biomimetic Systems. Objective Statement:

E N D
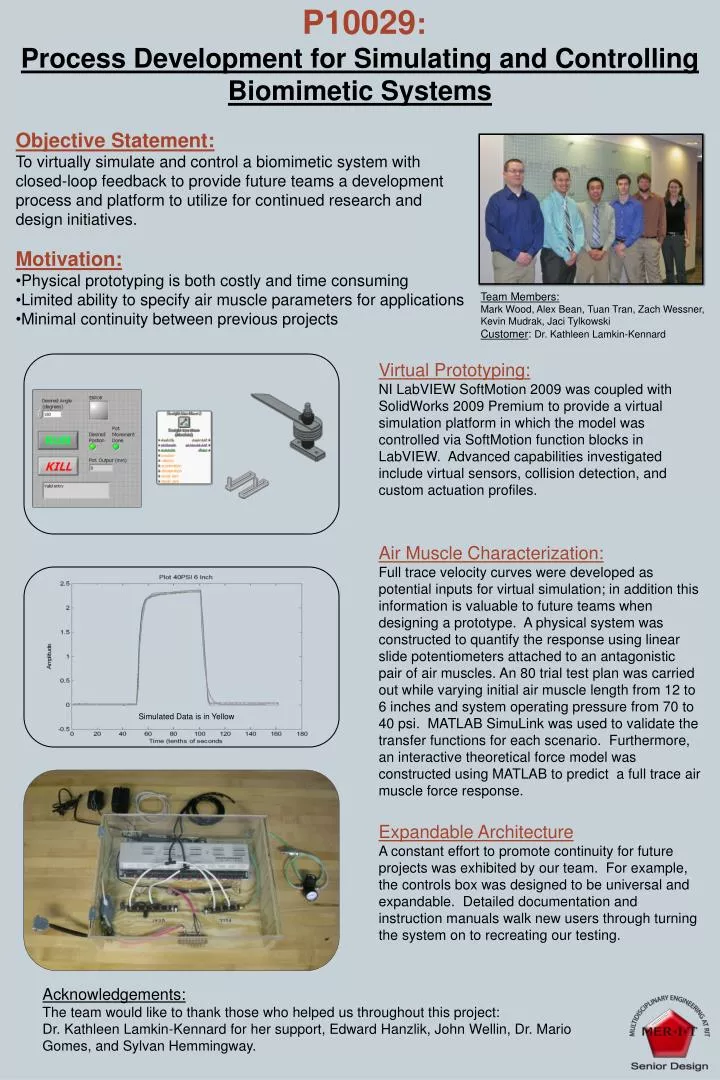
P10029: Process Development for Simulating and Controlling Biomimetic Systems Objective Statement: To virtually simulate and control a biomimetic system with closed-loop feedback to provide future teams a development process and platform to utilize for continued research and design initiatives. • Motivation: • Physical prototyping is both costly and time consuming • Limited ability to specify air muscle parameters for applications • Minimal continuity between previous projects Team Members: Mark Wood, Alex Bean, Tuan Tran, Zach Wessner, Kevin Mudrak, Jaci Tylkowski Customer: Dr. Kathleen Lamkin-Kennard Virtual Prototyping: NI LabVIEW SoftMotion 2009 was coupled with SolidWorks 2009 Premium to provide a virtual simulation platform in which the model was controlled via SoftMotion function blocks in LabVIEW. Advanced capabilities investigated include virtual sensors, collision detection, and custom actuation profiles. Air Muscle Characterization: Full trace velocity curves were developed as potential inputs for virtual simulation; in addition this information is valuable to future teams when designing a prototype. A physical system was constructed to quantify the response using linear slide potentiometers attached to an antagonistic pair of air muscles. An 80 trial test plan was carried out while varying initial air muscle length from 12 to 6 inches and system operating pressure from 70 to 40 psi. MATLAB SimuLink was used to validate the transfer functions for each scenario. Furthermore, an interactive theoretical force model was constructed using MATLAB to predict a full trace air muscle force response. Simulated Data is in Yellow Expandable Architecture A constant effort to promote continuity for future projects was exhibited by our team. For example, the controls box was designed to be universal and expandable. Detailed documentation and instruction manuals walk new users through turning the system on to recreating our testing. Acknowledgements: The team would like to thank those who helped us throughout this project: Dr. Kathleen Lamkin-Kennard for her support, Edward Hanzlik, John Wellin, Dr. Mario Gomes, and Sylvan Hemmingway.