Download
1 / 36
360 likes | 546 Views
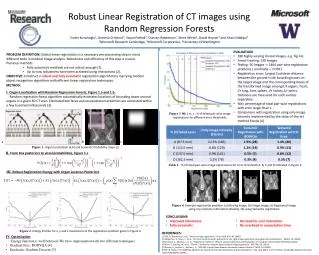
Robust Global Registration. Natasha Gelfand Niloy Mitra Leonidas Guibas Helmut Pottmann. Registration Problem. Given:. Two shapes P and Q which partially overlap. . Goal:. Using only rigid transforms , register Q against P by minimizing the squared distance between them .

E N D
Robust Global Registration Natasha Gelfand Niloy Mitra Leonidas Guibas Helmut Pottmann
Registration Problem Given: Two shapes P and Q which partially overlap. Goal: Using only rigid transforms, register Q against P by minimizing the squared distance between them.
Applications • Shape analysis • similarity, symmetry detection, rigid decomposition • Shape acquisition [Anguelov 04] [Koller 05] [Pauly 05]
Approaches I [Besl 92, Chen 92] • Iterative minimization algorithms (ICP) • Properties • Dense correspondence sets • Converges if starting positions are “close” 3. Iterate 2. Align corresponding points 1. Build a set of corresponding points
Approaches II [Stockman 87, Hecker 94, Barequet 97] • Voting methods • Geometric hashing, Hough transform, alignment method • Rigid transform can be specified with small number of points • Try all possible transform bases • Find the one that aligns the most points • Guaranteed to find the correct transform • But can be costly
Approaches III [Mokh 01, Huber 03, Li 05] • Use neighborhood geometric information • Descriptors should be • Invariant under transform • Local • Cheap • Improves correspondence search or used for feature extraction
Registration Problem • Why it’s hard • Unknown areas of overlap • Have to solve the correspondence problem • Why it’s easy • Rigid transform is specified by small number of points • Prominent features are easy to identify We only need to align a few points correctly.
Method Overview • Use descriptors to identify features • Integral volume descriptor • Build correspondence search space • Few correspondences for each feature • Efficiently explore search space • Distance error metric • Pruning algorithms
Integral Descriptors [Manay 04] • Multiscale • Inherent smoothing f(x) Br(p) p
0.20 Integral Volume Descriptor • Relation to mean curvature
Descriptor Computation • Approximate using a voxel grid • Convolution of occupancy grid with ball
Feature Identification • Pick as features points with rare descriptor values • Rare in the data [ rare in the model [ few correspondences • Works for any descriptor Features
Multiscale Algorithm • Features should be persistent over scale change
Feature Properties • Sparse • Robust to noise • Non-canonical
Correspondence Space • Search the whole model for correspondences • Range query for descriptor values • Cluster and pick representatives Q P
Evaluating Correspondences • Coordinate root mean squared distance • Requires best aligning transform • Looks at correspondences individually
Rigidity Constraint • Pair-wise distances between features and correspondences should be the same Q P
Rigidity Constraint • Pair-wise distances between features and correspondences should be the same Q P
Rigidity Constraint • Pair-wise distances between features and correspondences should be the same Q P
Evaluating Correspondences • Distance root mean squared distance • Depends only on internal distance matrix
Q P Search Algorithm • Few features, each with few potential correspondences • Minimize dRMS • Exhaustive search still too expensive
Search Algorithm • Branch and bound • Initial bound using greedy assignment • Discard partial correspondences that fail thresholding test • Prune if partial correspondence exceeds bound • Spaced out features make incorrect correspondences fail quickly • Since we explore the entire search space, we are guaranteed to find optimal alignment • Up to cluster size Rc qi pi pj qj
Search Algorithm • Branch and bound • Initial bound using greedy assignment • Discard partial correspondences that fail thresholding test • Prune if partial correspondence exceeds bound • Spaced out features make incorrect correspondences fail quickly • Since we explore the entire search space, we are guaranteed to find optimal alignment • Up to cluster size
Greedy Initialization • Good initial bound is essential • Build up correspondence set hierarchically …
Greedy Initialization • Good initial bound is essential • Build up correspondence set hierarchically … …
Greedy Initialization • Good initial bound is essential • Build up correspondence set hierarchically …
Partial Alignment • Allow null correspondences, while maximizing the number of matches points
Alignment Results Input: 2 scans Our alignment Refined by ICP
Alignment Results Our alignment Refined by ICP Input: 10 scans
Symmetry detection Match a shape to itself Symmetry Detection
Rigid Decomposition • Repeated application of partial matching
Conclusions • Simple feature identification algorithm • Used integral volume descriptor • Applicable for any low-dimensional descriptor • Correspondence evaluation using dRMS error • Look at pairs of correspondences, instead of individually • Efficient branch and bound correspondence search • Finds globally best alignment
Future Work • Linear features
Future Work • Linear features • Fast rejection tests • More descriptors
Acknowledgements • Daniel Russel • An Nguyen • Doo Young Kwon • Digital Michelangelo Project • NSF CARGO-0138456, FRG-0454543, ARO DAAD 19-03-1-033, Max Plank Fellowship, Stanford Graduate Fellowship, Austrian Science Fund P16002-N05