Download
1 / 1
10 likes | 140 Views
UNSW. Adaptive model theory: A simulation study of speed-accuracy tradeoff in aimed movements. 2006. Robin T. Bye * and Peter D. Neilson. 1. Introduction

E N D
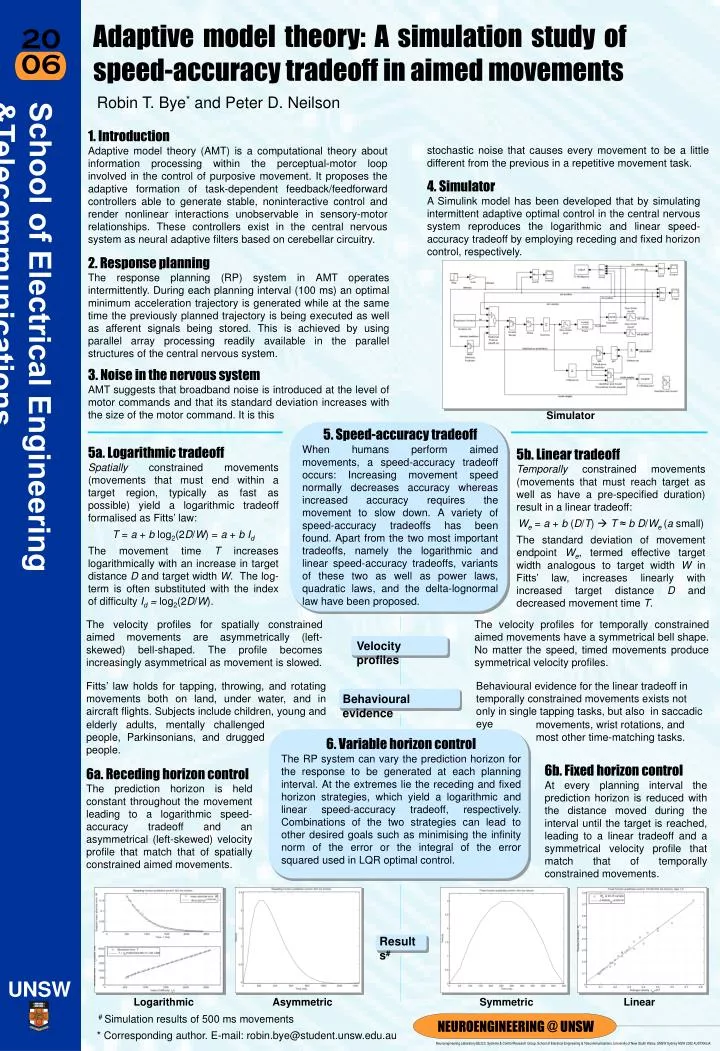
UNSW Adaptive model theory: A simulation study of speed-accuracy tradeoff in aimed movements 2006 Robin T. Bye* and Peter D. Neilson 1. Introduction Adaptive model theory (AMT) is a computational theory about information processing within the perceptual-motor loop involved in the control of purposive movement. It proposes the adaptive formation of task-dependent feedback/feedforward controllers able to generate stable, noninteractive control and render nonlinear interactions unobservable in sensory-motor relationships. These controllers exist in the central nervous system as neural adaptive filters based on cerebellar circuitry. stochastic noise that causes every movement to be a little different from the previous in a repetitive movement task. 4. Simulator A Simulink model has been developed that by simulating intermittent adaptive optimal control in the central nervous system reproduces the logarithmic and linear speed-accuracy tradeoff by employing receding and fixed horizon control, respectively. 2. Response planning The response planning (RP) system in AMT operates intermittently. During each planning interval (100 ms) an optimal minimum acceleration trajectory is generated while at the same time the previously planned trajectory is being executed as well as afferent signals being stored. This is achieved by using parallel array processing readily available in the parallel structures of the central nervous system. 3. Noise in the nervous system AMT suggests that broadband noise is introduced at the level of motor commands and that its standard deviation increases with the size of the motor command. It is this Simulator 5. Speed-accuracy tradeoff When humans perform aimed movements, a speed-accuracy tradeoff occurs: Increasing movement speed normally decreases accuracy whereas increased accuracy requires the movement to slow down. A variety of speed-accuracy tradeoffs has been found. Apart from the two most important tradeoffs, namely the logarithmic and linear speed-accuracy tradeoffs, variants of these two as well as power laws, quadratic laws, and the delta-lognormal law have been proposed. 5a. Logarithmic tradeoff Spatially constrained movements (movements that must end within a target region, typically as fast as possible) yield a logarithmic tradeoff formalised as Fitts’ law: T = a + b log2(2D/W) = a + b Id The movement time T increases logarithmically with an increase in target distance D and target width W. The log-term is often substituted with the index of difficulty Id = log2(2D/W). 5b. Linear tradeoff Temporally constrained movements (movements that must reach target as well as have a pre-specified duration) result in a linear tradeoff: We = a + b (D/T) T≈bD/We(a small) The standard deviation of movement endpoint We, termed effective target width analogous to target width W in Fitts’ law, increases linearly with increased target distance D and decreased movement time T. School of Electrical Engineering &Telecommunications The velocity profiles for spatially constrained aimed movements are asymmetrically (left-skewed) bell-shaped. The profile becomes increasingly asymmetrical as movement is slowed. The velocity profiles for temporally constrained aimed movements have a symmetrical bell shape. No matter the speed, timed movements produce symmetrical velocity profiles. Velocity profiles Fitts’ law holds for tapping, throwing, and rotating movements both on land, under water, and in aircraft flights. Subjects include children, young and Behavioural evidence for the linear tradeoff in temporally constrained movements exists not only in single tapping tasks, but also in saccadic eye Behavioural evidence elderly adults, mentally challenged people, Parkinsonians, and drugged people. movements, wrist rotations, and most other time-matching tasks. 6. Variable horizon control The RP system can vary the prediction horizon for the response to be generated at each planning interval. At the extremes lie the receding and fixed horizon strategies, which yield a logarithmic and linear speed-accuracy tradeoff, respectively. Combinations of the two strategies can lead to other desired goals such as minimising the infinity norm of the error or the integral of the error squared used in LQR optimal control. 6b. Fixed horizon control At every planning interval the prediction horizon is reduced with the distance moved during the interval until the target is reached, leading to a linear tradeoff and a symmetrical velocity profile that match that of temporally constrained movements. 6a. Receding horizon control The prediction horizon is held constant throughout the movement leading to a logarithmic speed-accuracy tradeoff and an asymmetrical (left-skewed) velocity profile that match that of spatially constrained aimed movements. Results# Logarithmic Asymmetric Symmetric Linear # Simulation results of 500 ms movements NEUROENGINEERING @ UNSW * Corresponding author. E-mail: robin.bye@student.unsw.edu.au Neuroengineering Laboratory EE223, Systems & Control Research Group, School of Electrical Engineering & Telecommunications, University of New South Wales, UNSW Sydney NSW 2052 AUSTRALIA