Download
1 / 1
10 likes | 175 Views
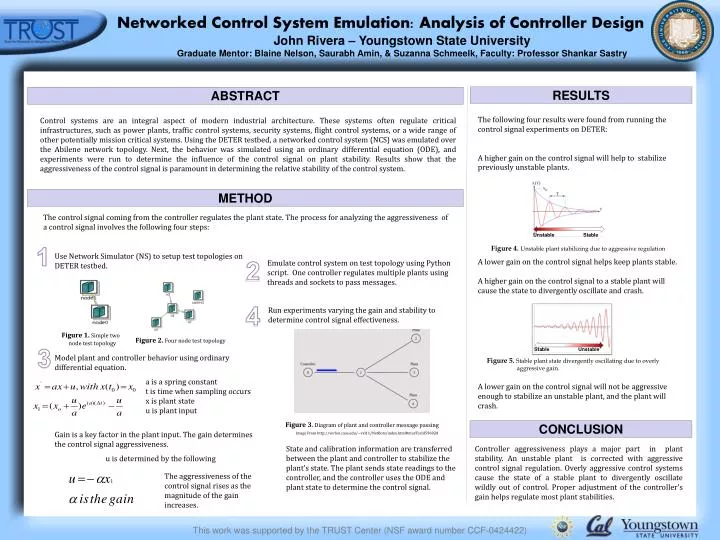
Networked Control System Emulation: Analysis of Controller Design. John Rivera – Youngstown State University Graduate Mentor: Blaine Nelson, Saurabh Amin , & Suzanna Schmeelk , Faculty: Professor Shankar Sastry. RESULTS. ABSTRACT.

E N D
Networked Control System Emulation: Analysis of Controller Design John Rivera – Youngstown State University Graduate Mentor: Blaine Nelson, SaurabhAmin, & Suzanna Schmeelk, Faculty: Professor Shankar Sastry RESULTS ABSTRACT • The following four results were found from running the control signal experiments on DETER: • A higher gain on the control signal will help to stabilize previously unstable plants. • Figure 4. Unstable plant stabilizing due to aggressive regulation • A lower gain on the control signal helps keep plants stable. • A higher gain on the control signal to a stable plant will cause the state to divergently oscillate and crash. • Figure 5. Stable plant state divergently oscillating due to overly aggressive gain. • A lower gain on the control signal will not be aggressive enough to stabilize an unstable plant, and the plant will crash. Control systems are an integral aspect of modern industrial architecture. These systems often regulate critical infrastructures, such as power plants, traffic control systems, security systems, flight control systems, or a wide range of other potentially mission critical systems. Using the DETER testbed, a networked control system (NCS) was emulated over the Abilene network topology. Next, the behavior was simulated using an ordinary differential equation (ODE), and experiments were run to determine the influence of the control signal on plant stability. Results show that the aggressiveness of the control signal is paramount in determining the relative stability of the control system. METHOD The control signal coming from the controller regulates the plant state. The process for analyzing the aggressiveness of a control signal involves the following four steps: Use Network Simulator (NS) to setup test topologies on DETER testbed. Unstable Stable 1 2 Emulate control system on test topology using Python script. One controller regulates multiple plants using threads and sockets to pass messages. 4 • Run experiments varying the gain and stability to determine control signal effectiveness. • Figure 3. Diagram of plant and controller message passing • State and calibration information are transferred between the plant and controller to stabilize the plant’s state. The plant sends state readings to the controller, and the controller uses the ODE and plant state to determine the control signal. Figure 1. Simple two node test topology Figure 2.Four node test topology Model plant and controller behavior using ordinary differential equation. a is a spring constant t is time when sampling occurs x is plant state u is plant input Gain is a key factor in the plant input. The gain determines the control signal aggressiveness. u is determined by the following 3 Stable Unstable CONCLUSION Image From http://vorlon.case.edu/~vxl11/NetBots/index.html#mozTocId596028 Controller aggressiveness plays a major part in plant stability. An unstable plant is corrected with aggressive control signal regulation. Overly aggressive control systems cause the state of a stable plant to divergently oscillate wildly out of control. Proper adjustment of the controller’s gain helps regulate most plant stabilities. The aggressiveness of the control signal rises as the magnitude of the gain increases. This work was supported by the TRUST Center (NSF award number CCF-0424422)