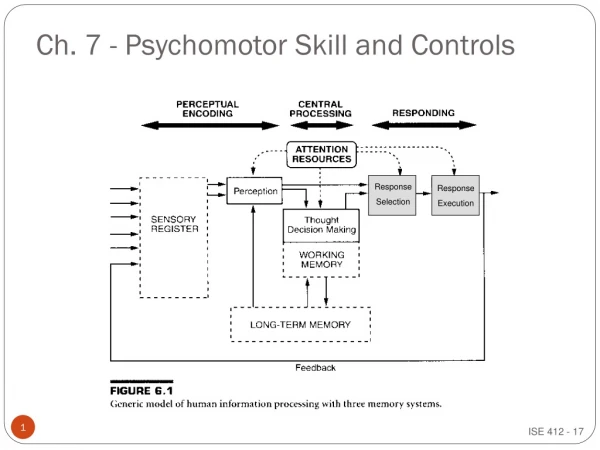
Ch. 7 - Psychomotor Skill and Controls
120 likes | 651 Views
Response Selection. Response Execution. Ch. 7 - Psychomotor Skill and Controls. Continuous control. Feedback control model for continuous control:. Disturbance input. Display. System or Plant. Human operator. Control Device. Target. Cursor. Wickens et. al, pg. 274.

Ch. 7 - Psychomotor Skill and Controls
E N D
Presentation Transcript
Response Selection Response Execution Ch. 7 - Psychomotor Skill and Controls
Continuous control • Feedback control model for continuous control: Disturbance input Display System or Plant Human operator Control Device Target Cursor Wickens et. al, pg. 274
Tracking: Pursuit vs Compensatory • Pursuit - “chasing” the target • Display “tells you where you are” in relation to the target • Examples: driving, visual flight, tracing a path • Compensatory - reducing the error • Display “tells you where you should be” and the error • Examples: aircraft instrument landing system, glide slope indicator; “pong” game • http://www.xnet.se/javaTest/jPong/jPong.html
Input • Frequency of movement of the target bandwidth of the input • overshoot and undershoot errors depend on the range of magnitude changes • time lag errors depend on the frequency of changes • "Look-ahead" or prediction • provide cues as to the direction and magnitude of the next change • fewer and smaller errors • smoother control motions
Control order (what type of controller is "best"?) • 0-order (position) • e.g., moving the mouse to a position on the screen • 1st -order (velocity) • e.g., joystick where increased control force increases the speed of response • 2nd - order (acceleration) • e.g, low speed ship steering, rocket maneuvering Position Time Position Time Position Time
Problems of stability • Closed-loop instability of the controlled system due to overcorrections, resulting in oscillations around the target. • Due to: • time lags - delay between control input and system response • high gain - the system response to a given control input is too great for the operator to correctly control • inappropriate operator response - too fast for system response, possibly due to combination of time lags and high input bandwidth • Design guidelines to reduce instability … • reduce time lags through preview / predictor displays, better display design • lower the gain • change control strategy • “open loop” operation
Control Input Devices Keyboard Switch Mouse Voice Knob Pointer Trackball/joystick Button
Buttons, switches, and knobs • Recall design issues … • Physical feel • Size • Compatibility • spatial, proximity • pictorial realism, moving part • frame of reference, conceptual (mental models) • Affordances and constraints • Movement time, reaction time
Keyboards and keypads • Keyboards • Purpose • Layout • QWERTY, DVORAK, alphabetic • Keypads • Purpose • Layout • telephone vs calculator • Chordic keyboards
Mouse vs pointer • For spatial tasks • Direct vs indirect control • Pointer (light pen, touch screen, etc.) • direct control • faster, but less accurate • parallax errors • size issues with touch screen • best for more complex spatial control movements • Mouse, touchpad, tablet • indirect control • more precise, but slower • adjustable gain
Technology issues in voice input … • Noise control • “Robust against drift” (i.e., not affected by stress, natural changes in speaker voice.) • Encoding, buffers, and editing • Prompting (visual and auditory, etc.) and feedback • Remote data entry • Interruption allowance, continuous recognition, gender independence • Customization (vocabulary, branching, applications, communication modes, etc.) • Queuing of input data • Help functions, ease of use, etc. (from: Pulat, B.M. (1997) Fundamentals of Industrial Ergonomics (2nd ed), Ch. 10. Prospect Heights, IL: Waveland Press.)