Download
1 / 15
150 likes | 318 Views
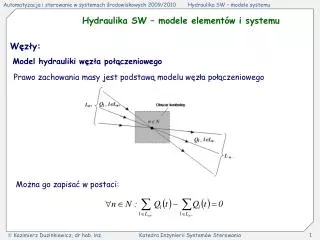
Hydraulika SW – modele elementów i systemu. Węzły:. Model hydrauliki węzła połączeniowego. Prawo zachowania masy jest podstawą modelu węzła połączeniowego. Można go zapisać w postaci:. Model węzła połączeniowego z dostarczaniem wody

E N D
Hydraulika SW – modele elementów i systemu Węzły: Model hydrauliki węzła połączeniowego Prawo zachowania masy jest podstawą modelu węzła połączeniowego Można go zapisać w postaci:
Model węzła połączeniowego z dostarczaniem wody Model hydrauliki węzła połączeniowego z dostarczaniem wody ma postać: Model węzła połączeniowego z poborem wody Model hydrauliki węzła połączeniowego z dostarczaniem wody ma postać:
Model hydrauliki węzła zbiornikowego Prawo zachowania masy jest podstawą modelu węzła ze zbiornikiem Mogą występować dwa rodzaje zbiorników: przepływowe i nieprzepływowe. Dla dowolnego węzła zbiornikowego: z warunkiem początkowym:
Ograniczając się do zbiorników o stałym polu lustra wody, dla węzła zbiornika przepływowego można zapisać jego model w postaci: a dla węzła zbiornika nieprzepływowego w postaci: z warunkiem początkowym :
Model węzłów połączeniowych przyłączonych do zbiornika przepływowego Z każdym węzłem zbiornika przepływowego związane są dwa węzły połączeniowe. Model hydrauliki takich węzłów ma postać Model węzła połączeniowego przyłączonego do zbiornika nieprzepływowego Z każdym węzłem zbiornika nieprzepływowego związany jest jeden węzeł połączeniowy. Model hydrauliki takiego węzła ma postać:
Model węzła zbiornikowego Modele hydrauliki węzłów zbiornikowych zostały sformułowane w odniesieniu do wysokości słupa wody w tych zbiornikach. Aby uzyskać model naporu w tych węzłach należy te modele uzupełnić równaniem: Model węzła rezerwuarowego - ujęcie wody Ujęcie wody w rzeczywistym SW składa się z kilku podstawowych elementów: źródła wody (najczęściej studnia głębinowa lub źródło powierzchniowe – rzeka, jezioro itp.) , pomp pierwszego stopnia, części uzdatniającej wodę oraz pomp drugiego stopnia. W modelach SW tą strukturę upraszcza się. Zastępuje się jej pierwsze trzy elementy tej części SW, poprzez jeden węzeł „rezerwuar”. Węzeł tej jest elementem granicznym systemu, w którym dostarczana jest woda do systemu. Węzeł taki może być podłączony do SW poprzez węzeł z dostawcą do którego dostarczana jest woda wodę
Model poboru wody Podstawowym zadaniem SW zaspokojenie poboru wody przez odbiorców, który z punktu widzenia automatyki, traktowany jest jako zakłócenie. W efektywnym sterowaniu SW, do wyznaczenia najlepszego sterowania konieczna jest predykcji zakłócenia W zależności od charakteru trajektorii poboru wody w przeciągu doby można wyróżnić kilka rodzajów odbiorców • domy jedno- i wielorodzinne; • zakłady przemysłowe; • gastronomie i hotele; • administracja; • rekreacyjne – pola golfowe, baseny itp.; • szkoły.
Odbiorca typu dom wielorodzinny Odbiorca typu restauracja
W przeciętej wielkości SW może istnieć kilka tysięcy odbiorców wody. Indywidualne wyznaczenie profilu poboru wody dla każdego odbiorcy ze względu na stochastyczny charakter, jest niemożliwe. Łatwiej jest określić profil poboru wody dla pewnych obszarów SW tzw. „skumulowanych odbiorców”. Obszary te wyznaczane są wykorzystując usytuowanie danych rodzajów odbiorców w określonych obszarach miasta. Ponieważ charakter odbiorcy nie zmienia się w czasie (horyzont kilku do kilkunastu miesięcy) ale może zmieniać się sezonowa ilość pobieranej wody stąd dla każdego z tych obszarów wyznacza się „bazowa wartość poboru wody” (BWPW) oraz przypisuje się „wzorzec poboru wody” (WPW). Poprzez pomnożenie podstawowej wartości poboru wody przez wartość wzorca poboru wody, w każdej chwili czasu otrzymujemy profil poboru wody
W sterowaniu SW nie jest konieczna znajomość zakłócenia w każdej chwili czasu, stąd dokonując predykcji zakłóceń określa się najczęściej średnia wartość zakłócenia jak będzie danym przedziale czasu w przyszłości (predykcja punktowa) Porównanie poboru rzeczywistego z predykcją punktową
Modele hydrauliki sieci wodociągowej Pierwszym krokiem w budowie modelu sieci wodociągowej, który następnie ma stanowić podstawę modelu wykorzystywanego w problemach monitorowania i sterowania, jest podjecie decyzji o tym, które elementy tej sieci są istotne z punktu widzenia rozważanego problemu i włączenie tylko tych elementów do definicji rozważanego systemu. Dla dużych systemów dostarczania i dystrybucji wody pitnej niezbędne jest przeprowadzenie procesu nazywanego szkieletonizacją. Inaczej mówiąc, nie wszystkie rurociągi i związane z nimi obiekty (zawory, pompy, itd.) są włączane do definicji systemu. Proces szkieletonizacji może przybierać różne formy, przykładowo można wymienić niektóre z nich: 1. Jako końcowi odbiorcy wody nie są rozważane poszczególne budynki (pojedynczy odbiorcy) a ich większe zbiory, np. całe osiedla mieszkaniowe; 2. Uwzględniane są jedynie te rurociągi, które łączą źródła wody pitnej z obszarami jej poboru, tzn. rurociągi dostarczania i główne rurociągi dystrybucyjne; 3. Uwzględniane są jedynie te obiekty sieci, które są istotne dla operacyjnych działań w systemie.
Pierwszą grupę równań modelu hydrauliki SW stanowią równania bilansu masy dla węzłów sieci zapisane w oparciu o prawo zachowania masy. Możemy tę grupę równań zapisać w postaci: gdzie:
Drugą grupę równań modelu hydrauliki stanowią równania zachowania energii dla oczek i ścieżek wyróżnionych w sieci. Uznając oczywiste założenie, że średnica poszczególnych rurociągów sieci jest taka sama na ich początkach i końcach, dla dowolnej ścieżki łączącej dwa węzły, które oznaczymy, początkowy A i końcowy B możemy napisać, korzystając w prawa zachowania energii następującą zależność:
Dla dowolnego oczka możemy napisać: Trzecią grupę równań modelu hydrauliki stanowią równania dynamiki dla węzłów zbiornikowych zapisane w oparciu o prawo zachowania masy