Download

1 / 28
280 likes | 569 Views
Pieranna Servadio CRA-ING. Programma triennale di ricerca agricola, agroambientale, agroalimentare e agroindustriale del Lazio (PRAL). Agricoltura di precisione per le colture cerealicole del Lazio APreCeL Progetto finanziato dalla Regione Lazio, Assessorato all'agricoltura.

E N D
Pieranna Servadio CRA-ING Programma triennale di ricerca agricola, agroambientale, agroalimentare e agroindustriale del Lazio (PRAL) Agricoltura di precisione per le colture cerealicole del LazioAPreCeL Progetto finanziato dalla Regione Lazio, Assessorato all'agricoltura Tecnologie geospaziali ed informatiche per la gestione delle colture agrarie con la strategia dell’agricoltura di precisione
L’obiettivo generale della presente ricerca è stato quello di valutare, dal punto di vista agronomico economico ed ambientale, costi e benefici dell’introduzione di tecnologie di agricoltura di precisione per le colture cerealicole del Lazio.
L’agricoltura di precisione è una strategia di gestione aziendale che usa le tecnologie dell'informazione per acquisire dati che portino a decisioni finalizzate alla produzione agricola. Lo scopo è quello di mettere in sintonia la gestione del terreno e delle colture con le specifiche esigenze di un campo eterogeneo al fine di migliorare la produzione, minimizzare i danni ambientali ed elevare gli standard qualitativi dei prodotti agricoli.
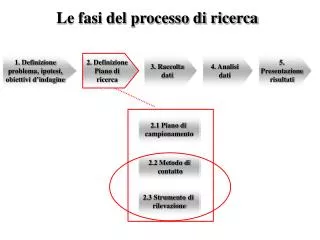
La sua pratica applicazione è oggi possibile grazie alle avanzate tecniche e sistemi informatici di monitoraggio, con i quali si possono automaticamente ottenere informazioni sulle condizioni delle colture e del suolo e sulle loro variazioni nello spazio e nel tempo. L’agricoltura di precisione si basa su tre principali fasi : 1) acquisizione e registrazione dei dati ad una appropriata scala e frequenza, 2) interpretazione ed analisi di quei dati, 3) implementazione di una risposta gestionale ad una appropriata scala e tempo.
Principali tecnologie disponibili Informazioni georeferenziate La georeferenziazione si riferisce alla relazione esistente fra un’informazione territoriale e la sua posizione geografica, la posizione nello spazio definito dalla superficie terrestre nella quale il fenomeno si è verificato. Questo rende possibile il confronto fra i diversi dati spaziali rilevati in uno stesso campo come: proprietà fisiche del suolo, produzione, irrigazione, contenuto di fertilizzanti, applicazioni di prodotti chimici a volume variabile.
Sistema di posizionamento globale (GPS) Il sistema di posizionamento globale (GPS) è un sistema di radio-navigazione satellitare in grado di fornire informazioni di posizione nelle tre direzioni spaziali, velocità e tempo. I ricevitori GPS usano i segnali che provengono da quattro o più satelliti in vista per calcolare la posizione dell’utente, la sua velocità, il tempo ed altri dati necessari alle applicazioni agricole. L’uso delle tecniche Differenziali DGPS consente di ottenere una buona precisione sia per la valutazione della posizione che della velocità. Il GPS Differenziale è un sistema in grado di calcolare in tempo reale le posizioni corrette (x.y.z) con una precisione elevata senza bisogno di correggere successivamente i dati dopo che questi sono stati registrati. Questo tipo di GPS è utile per svolgere operazioni come la mappatura dei raccolti con elevata risoluzione, la guida su traiettorie parallele, il campionamento del suolo e la distribuzione dei fertilizzanti e pesticidi a volume variabile nello spazio (VRA), o la guida in automatico dei veicoli agricoli.
Sistemi d’informazione geografica (GIS) Un sistema informativo geografico (GIS) è un’ applicazione software costituita da più moduli finalizzati ad acquisire, controllare, integrare, elaborare e rappresentare dei dati che sono spazialmente riferiti alla superficie terrestre (Servadio, 2003). I software GIS sono disponibili con una vasta gamma di capacità e funzioni, ma tutti sono capaci di mostrare sotto forma grafica i dati georeferenziati. Sebbene un singolo strato di dati (es. dati della produzione) può essere mappato con l’uso di software meno sofisticati, le relazioni più complesse (es. modelli temporali o confronti multivariati) sono meglio interpretate con i sistemi GIS più completi. Un’adeguata co-registrazione di dati può essere analizzata quantitativamente per mezzo dell’uso della geostatistica o di altre procedure. Un principio di base nel GIS è che i diversi strati di una mappa per essere usati insieme devono basarsi sullo stesso sistema di coordinate. Tutti i file di dati spaziali in un GIS sono dunque georeferenziati con sistema GPS. I GIS in combinazione con il GPS possono essere impiegati per effettuare il controllo della navigazione delle macchine agricole in campo.
Altri programmi grafici per la redazione di mappe tematiche Oltre ai software per GIS, esistono programmi grafici per Microsoft Windows che permettono di redigere mappe bi e tridimensionali le cui informazioni su di una mappa sono rappresentate per mezzo di variazione continua di colore attraverso la stessa. Questi programmi, interpolano dati X, Y, Z (longitudine, latitudine e valore assegnato a ciascun punto), spaziati irregolarmente in una griglia regolare. La griglia è poi usata per produrre differenti tipi di mappe: a contorni, vettoriale, d’immagine, sfumata a rilievo, tridimensionale ecc. I vari metodi producono un’interpolazione spaziale regolare di valori da dati irregolarmente distribuiti. Nella maggior parte dei casi il metodo d’interpolazione consigliato è il Kriging, con un variogramma lineare, in quanto è uno dei metodi più flessibili ed è utile per creare griglie di qualsiasi tipo di un insieme di dati. La densità della griglia può essere predeterminata o definita automaticamente dal numero dei dati presenti. I limiti della griglia definiscono l’estensione delle mappe che poi vi si costruiscono sopra. I metodi di griglia in questi programmi utilizzano algoritmi d’interpolazione a media pesata a significare che, a parità d’altri fattori, tanto più vicino è un punto di misura rispetto al nodo della griglia, tanto più peso ha per determinare il valore della funzione in un particolare nodo.
Sistemi per la mappatura delle rese Durante la raccolta integralmente meccanizzata ed effettuata in un unico passaggio, i sistemi per la mappatura della resa acquisiscono e registrano, con il supporto del sistema di posizionamento globale e del quantimetro, entrambi posizionati sulla mietitrebbiatrice, i valori delle rese in una forma continua nella progressione delle coordinate di posizione. Durante il monitoraggio della resa una serie di sensori che equipaggiano la macchina raccoglitrice, rilevano: la posizione della mietitrebbiatrice nel campo; il flusso della granella; la densità e l’umidità della granella; la velocità d’avanzamento; la capacità di lavoro espressa come quantità di prodotto raccolto nel tempo e nello spazio; la larghezza effettiva della barra; l’inclinazione della macchina sul piano orizzontale. I dati rilevati vengono acquisiti dal sistema informativo elettronico di bordo, visualizzati sul display e registrati mediante ‘memory-card’ che interfaccia il computer montato in cabina con il programma di gestione installato sul PC aziendale dove le mappe vengono elaborate. Le mappe così create illustrano le aree di variabilità della resa derivata sia da processi naturali che da pratiche agricole e sono utili per supportare le scelte relative alle successive applicazioni di prodotti differenziati nello spazio (VRA).
Tecnologie per la distribuzione degli inputs agricoli a percentuale variabile • L’hardware relativo al sistema di posizionamento per la guida integrata delle macchine agricole per la distribuzione degli agrochimici, sementi ed acqua irrigua a percentuale variabile nello spazio (VRA) si basa su dosaggi specifici e prestabiliti per ogni determinata zona, nel campo, opposte ai dosaggi a flusso o volume costanti su tutto il campo. I dosaggi dei prodotti sono generati: • sulla base di mappe della fertilità del suolo (create a loro volta sulla base dei campioni raccolti) e delle rese (per le macchine per la raccolta dei prodotti dove il prodotto raccolto viene monitorato in maniera specifica per ogni sito). I VRT basati sulle mappe richiedono un sistema di localizzazione georeferenziata GPS/DGPS ed un’unità di comando per la memorizzazione dei dosaggi specifici da distribuire per ogni determinata zona, nel campo. • Sulla base di sensori a tempo reale, non richiedono un sistema di localizzazione georeferenziata, ma includono una unità di comando dinamica che specifica l’applicazione per mezzo di una analisi a tempo reale dei parametri del suolo e/o della coltura. Detti parametri sono misurati da sensori a tempo reale che sono utili soprattutto nel caso di variabili dinamiche nel tempo come il contenuto di azoto nitrico nel suolo e le infestazioni parassitarie.
Sensori del suolo e della pianta Lo sviluppo di un sistema di sensori offre l’opportunità di automatizzare la raccolta dei campioni sul suolo e sulle colture ad un maggiore livello d’intensità. Sensori del suolo Contenuto di sostanza organica sensori ottici Contenuto idrico raggi IR o microonde Proprietà fisiche penetrometri, sensori ad induzione elettromagnetica Sensori della pianta Livello nutritivo sensori ad ind. Elettromagnetica ed all’IR Stato della coltura riflettanza, radiometri, analizzatori d’immagine IR Investimento sensori meccanici e fotoelettrici Infestanti sensori di riflessione della luce visibile o all’IR, analisi d’immagine Lo sviluppo del VRA e dei modelli sulla produttività delle colture potrà avere una più rapida espansione con una più elevata densità di parametri misurati sul suolo e sulla coltura.
Sensori remoti Con l’ausilio dei dati forniti dai sistemi di telerilevamento satellitare, dalle immagini di foto aeree e dalle avanzate tecniche elettroniche di monitoraggio si possono automaticamente registrare la coltura e le condizioni del suolo nello spazio e nel tempo. Guida di precisione delle macchine in campo CONTROLLO DELLE TRAIETTORIE E DELLA POSIZIONE IN CAMPO DELLA TRATTRICE AGRICOLA MEDIANTE SISTEMA SATELLITARE I sistemi integrati di guida e gestione specificatamente progettati per l’automazione agricola e basati sul GPS Differenziale, utilizzano i dati dei ricevitori GPS (posizione della macchina agricola, sua velocità, tempo ecc.) nelle operazioni di campagna e per raccogliere i dati che saranno successivamente impiegati in ufficio per le ulteriori analisi.
Questi sistemi sono già configurati per applicazioni agricole che includono la mappatura dei campi, il campionamento del suolo, la creazione di fasce di terreno parallele in pianura e lungo le linee di livello in collina, le applicazioni a volume variabile per dosaggi differenziati ed il trasferimento dei dati su GIS. Il trasferimento dei dati raccolti in campo verso un personal computer avviene mediante una ‘memory-card’ scheda PCMCIA. I componenti del sistema ‘guida in campo’ posizionati sulla macchina sono: un ricevitore GP410TM in grado di ricevere le correzioni differenziali in tempo reale secondo lo standard RTCM SC-104 che consente elevate precisioni.
un’antenna GPS con base magnetica per il montaggio sulle trattrici ed un’antenna radio; una unità di controllo e visione ‘Rugged Map Dispaly’ (RMD) per la visione delle mappe e delle informazioni sui principali parametri di lavoro durante le attività di campagna; una barra luminosa a LED di ausilio di guida che consiste in una serie di LED (diodi emettitori di luce) che sono utilizzati per indicare la posizione del veicolo rispetto ad una traiettoria di movimento teorica. E’ possibile programmare la sensibilità in metri della barra a LED impostandola nel programma Guida in campo. Ad es. si può stabilire che l’accensione di 1 LED corrisponde a spostamenti, dalla traiettoria prestabilita, di 0,20 m. il software applicativo di supporto alla creazione delle mappe; - Kit di installazione (Marsili, Servadio, 1998).
Prove in campo svolte presso l’Azienda Maccarese S.p.A. Campo B064, mais
1. Individuazione del sistema informatico per la mappatura della resa più adatto all’installazione sulla mietitrebbiatrice di proprietà dell’azienda avente potenza al motore 245 kW, massa 15.400 kg senza testata, capacità del serbatoio della granella 7000 litri. Un sistema informatico per macchine operatrici per la raccolta e la distribuzione dei prodotti è generalmente composti da: - un quantimetro volumetrico o gravimetrico o d’altro tipo, - un’antenna o ricevitore DGPS, montata sulla cabina che capta i segnali satellitari, - dall’hardware, generalmente formato da una base fissa, installata in cabina sulla quale si aggancia il computer portatile, - dal software, - da un lettore di chipcard da collegare alla porta seriale del Personal Computer. Il computer portatile con integrato ricevitore GPS e ricevitore per la correzione differenziale del segnale di posizione DGPS può essere separato dalla base fissa per essere connesso su ogni tipo di macchina in azienda: su macchine da raccolta semoventi, su macchine per la distribuzione di prodotti, su trattrici ed inoltre può essere utilizzato come strumento di rilevamento dati per mappature a terra.
Sensore di umidità 2. Installazione del sistema informatico per l’Agricoltura di precisione (PFS) sulla mietitrebbiatrice composto da: Monitor collocato nella parte anteriore destra della cabina con possibilità di monitorare e visualizzare resa e qualità del prodotto raccolto – dal monitor si possono controllare anche tutti i parametri e le impostazioni della mietitrebbiatrice e si aziona tramite i tasti cursore e la tastiera alfanumerica sempre nel pannello destro Sensore di flusso della granella CCM3 PF desktop software PCMCIA memory-card registra e interfaccia il computer montato in cabina con il programma di gestione installato sul PC aziendale dove le mappe vengono elaborate. Antenna per la recezione del segnale satellitare GPS
Quantimetro Sensore di flusso della granella Il flusso della granella genera una spinta su di una superficie curva collegata ad un bilanciere incernierato, contrappesato e vincolato alla struttura di contenimento tramite misuratore di forza. Il sistema così descritto è fatto in modo da eliminare l’effetto sul misuratore di portata della granella delle eventuali forze dovute al moto accelerato della macchina raccoglitrice. Parte superiore dell’elevatore della granella con integrato il sensore di flusso della granella del tipo ad impatto. Altri metodi: massa, volume, metodi indiretti.
Veduta della mietitrebbiatrice in fase di raccolta del frumento duro con il sistema di mappatura satellitare in funzione.
3. Verifica tecnica della strumentazione per l’agricoltura di precisione e taratura della strumentazione elettronica-informatica di bordo Successivamente all’installazione è stata effettuata in campo un’operazione di controllo e verifica dei parametri funzionali della macchina e la taratura della strumentazione elettronica-informatica di bordo in condizioni operative, durante la raccolta di alcuni appezzamenti investiti a frumento duro e mais. Relativamente ai parametri funzionali della macchina, sono stati effettuati controlli su: superficie lavorata (ha); prodotto raccolto: massa secca (t), massa umida (t), volume totale secco (m3), volume totale umido (m3); distanze percorse (km); larghezza di lavoro effettiva della barra di taglio e sua impostazione; altezza di taglio; velocità di avanzamento della macchina; ore di lavoro effettuate. In fase di raccolta si è inoltre rilevata l’importanza della corretta impostazione, nel computer di bordo della mietitrebbiatrice, dei parametri di raccolta, come ad esempio la larghezza effettiva di raccolta, l’altezza di taglio e dello svolgimento delle operazioni con la massima accortezza.
4. Calibrazione del sensore di flusso e del sensore di umidità Prima delle operazioni di raccolta del grano (Giugno) e del mais da granella (agosto), sono state effettuate calibrazioni del sensore di flusso e del sensore di umidità. E’ importante svolgere con accuratezza la calibrazione, in modo da poter correggere l’eventuale errore prodotto dai sensori del PFS ed ottenere dati di resa attendibili. Convalidata la strumentazione è stata eseguita la mappatura georeferenziata delle rese, dell’umidità sul frumento e della velocità d’avanzamento della macchina.
I dati ottenuti dal sistema informatico di bordo sono stati successivamente elaborati, dapprima gestendo le mappe mediante il software della macchina. Successivamente tali dati sono stati esportati e corretti in base all’equazione di calibrazione ottenuta. Una elaborazione geostatistica mediante la tecnica di kriging ha permesso di visualizzare le mappe tematiche per gli appezzamenti oggetto di studio coltivati a grano ed a mais da granella.
Mappatura grano I contorni in queste figure sono stati ottenuti interpolando i dati usando il metodo del Kriging.
5. Calibrazione spandiconcime finalizzata alla distribuzione a volume variabile (VRA) del concime azotato, Urea
Trattrice equipaggiata con: Ricevitore GPS Sistema informatico di bordoriceve e confronta l’informazione di posizione della trattrice nel campo con quella registrata nella mappa di distribuzione. Il sistema interviene sulla posizione dell’attuatore se deve essere modificata la percentuale di volume da distribuire. Attuatore elettro-idraulicoper regolare la quantità di concime che esce dalla tramoggia. Connessione standard consente la comunicazione dei dati tra la trattrice e l’operatrice. Distribuzione a percentuale variabile del concime azotato
L’agricoltura di precisione sta cambiando il modo di condurre la ricerca in sito superando l’uso dei tradizionali appezzamenti e/o parcelle sperimentali. Le tecnologie informatiche possono produrre una quantità tale di informazioni da fare di tutta l’azienda un ambiente di studio trasformando gli imprenditori agricoli che operano secondo le tecniche di AP in operatori di ricerca. Si ringraziano: Claudio Destro direttore, Marco Borella, Enrico Gazzola, Alberto Bellotto della Maccarese S.p.A. per l’ospitalità, la messa a dispozione delle macchine operanti nel centro aziendale e per la collaborazione. Francesco Nassetti, Simone Bergonzoli, Paolo Osti, Nicoletta Rosati, per la collaborazione durante le prove in campo.
Bibliografia Servadio P., Marsili A., (1997) Il controllo delle traiettorie e della posizione in campo della trattrice agricola mediante bussola giroscopica e sistema satellitare per una agricoltura di precisione. VI Convegno Nazionale AIIA, Ingegneria per una agricoltura sostenibile, 9-12 settembre, Università di Ancona. Servadio P., Marsili A, (1998). Primi risultati di prove di un sistema satellitare per un’agricoltura di precisione. Rivista di Ingegneria Agraria n. 4. Servadio P., Marsili A, (1999). Prove di raccolta del mais da granella con mietitrebbiatrice Claas lexion 450. Macchine e Motori Agricoli n. 1. Servadio P., Marsili A, (1999). Precision agriculture to reduce energy input for a sustainable rural environment.International Congress AgEnergy ‘99 - Energy and Agriculture towards the third millennium. Athene, Greece, 2-5 june. Servadio P., Marsili A, (1999). An agricultural tractor’s orientation system on field.13th International Conference of ISTVS, 14-17 Sep. 1999, Munich - Germany. Marsili A., Servadio P., Beni C., Di Dio C., Figliolia A. (2000). Prove di raccolta meccanica del mais da granella con mietitrebbiatrice munita di quantimetro per correlare le quantità raccolte con le caratteristiche fisico-chimiche del suolo. Convegno sull’agricoltura di precisione svoltosi nell’ambito della Fiera Agricola di Foggia, 2-5 maggio. Servadio P., Marsili A., Beni C., Di Dio C.e Figliolia A. (2000). Spatial variability of maiz yield correlated with soil chemical and physical characteristics in the application of precision agriculture techniques.AgEng 2000, Precision agriculture scientific session, Warwick, UK 2-7 Luglio. Di Dio C., Servadio P., Marsili A., Figliolia A., (2000). I sistemi di agricoltura di precisione: il caso della fertilizzazione. Mondo macchina n. 9, settembre. Marsili A., Servadio P., (2002). Prove di raccolta con una raccogli-trincia-caricatrice semovente Claas dotata di sistema informativo di bordo. Macchine e Motori Agricoli n. 7/8. Servadio P., Blasi E., (2003). Agricoltura e occhio digitale. I GIS e le loro applicazioni nel settore agricolo. L’Informatore Agrario n. 49.