Download
1 / 33
411 likes | 1.09k Views
Mechanical Vibrations Department of Mechanical Engineering Alexandria Universiy Alexandria, Egypt. FALL 2013. Two Degrees of Freedom 2 nd Session. Instructor Dr. Mohamed Mostafa. Lagrange “Energy“ Method. Lagrange “Energy“ Method. Lagrange “Energy“ Method.

E N D
Mechanical Vibrations Department of Mechanical Engineering Alexandria Universiy Alexandria, Egypt FALL 2013 Two Degrees of Freedom2nd Session Instructor Dr. Mohamed Mostafa
Lagrange “Energy“ Method Dr. Mohamed Mostafa
Lagrange “Energy“ Method Dr. Mohamed Mostafa
Lagrange “Energy“ Method • Typical problems with Lagrange Formulation: • Be sure to establish number of degree of freedom first and formulate all energy terms in only those variables. • Clearly identify which degrees of freedom are relative coordinates versus absolute coordinates. • Watch out for rotational/translational problems. • For kinetic energy terms, be sure to formulate absolute velocities before taking derivatives. • For potential energy terms, be sure that the actual deflection, described by relative and/or absolute coordinates, in spring elements is described. Dr. Mohamed Mostafa
Lagrange “Energy“ Method • Typical problems with Lagrange formulation: • There should be only one total kinetic energy equation and one total potential energy equation for the system. • The kinetic and potential energy equations should involve only the N generalized coordinates and the constants (mass, damping, stiffness) of the system. • Apply the Lagrange Equation once for each generalized • coordinate . • For N degrees of freedom, N generalized coordinates will yield N equations of motion. Dr. Mohamed Mostafa
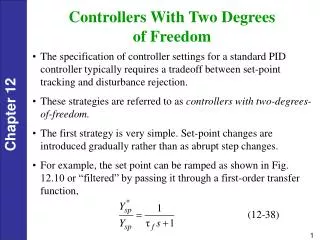
Lagrange “Energy“ Method For single degree of freedom systems, the Lagrange form will be reduced to the following form which is famous with “the energy method” Where; the F represents the force/moment acting along the direction of translational/rotational motion Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: For the double pendulum shown in figure; • Derive the equation of motion, • Find the characteristic equation, Solution: Applying the Lagrange method, where Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Where; D = 0 as there’s no dampers U = Ug1+Ug2 U = m1 g l1 (1-cosθ1) + m2 g [l1(1-cosθ1) + l2 (1-cosθ2) ] T = T1 +T2= Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Recall that the angles are assumed to be very small such that the velocity vectors of both mass are assumed to be horizontal. Hence; the absolute velocity of the second mass can be calculated as shown above. Thus Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Apply Lagrange w.r.to Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Apply Lagrange w.r.to Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Stiffness Matrix Mass Matrix Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: Notice that the system is dynamically coupled and statically uncoupled Let Substitute in the equation of motion Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Example 3: The determinant of this matrix is the characteristic equation which is a quadratic function of ω2 Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Consider a torsional system as shown in Figure. The differential equations of rotational motion for the discs can be derived as Example 4: Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] For the free vibration analysis of the system, the previous equation reduces to Example 4: (I) Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] Find the natural frequencies and mode shapes for the torsional system shown in Figure for J1 = J0 , J2 = 2 J0 and kt1 = kt2 = kt. Example 5: Solution: The differential equations of motion, Eq.(I), reduce to (with kt3 = 0, kt1 = kt2 = kt, J1 = J0 and J2 = 2J0): Rearranging and substituting the harmonic solution: Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] gives the frequency (characteristic) equation: Example 5: The solution of the above equation gives the natural frequencies Dr. Mohamed Mostafa
2 Degrees of Freedom Systems [Continue] The amplitude ratios are given by Example 5: Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Any algebraic problem in matrix form; which has a square matrix “A” operates on a column vector “a” will result in the same column vector “a” multiplied by a constant; is called Eigenvalue problem. That is A a =λ a Where λ is called Eigen-value and the corresponding vector a is called Eigen-vector. System with two degrees of freedom should have two Eigen -value accompanied with two Eigen-vectors. Recall the generic form of free undamped vibrating two degree of freedom system which is Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Where M is a square matrix Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Where M is a square matrix Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Comparing equation (1) with the standard Eigen-value problem One can clearly see that it is an Eigen-value problem. Notice that the Eigen-value represents the and the corresponding Eigen-vector represents the mode shape corresponding the calculated natural frequency MatLab: To calculate the Eigen-values and the corresponding Eigen-vectors, one can use the following [EigVal,EigVect] = eig(A) Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Example: For a two degree of freedom system, the following mass and stiffness matrices are listed down. Find the Eigen-values, natural frequencies, and the corresponding Eigen-vectors “mode shapes” MatLab Program % input the values of the mass matrix M = [10 0;0 1] % the mass matrix K = [35 5;5 10] % the stiffness matrix % the A matrix can be calcualted as follows A = inv(M)*K; % % the following is the shortcut step to calcualte the eigen value "squared frequency values" and the % corresponding eigen vector "the mode shape" [eigval, eigvect] = eig(A); Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Example 6: [Continue] For a two degree of freedom system, the following mass and stiffness matrices are listed down. Find the Eigen-values, natural frequencies, and the corresponding Eigen-vectors “mode shapes” MatLab Program % input the values of the mass matrix M = [10 0;0 1] % the mass matrix K = [35 5;5 10] % the stiffness matrix % the A matrix can be calculated as follows A = inv(M)*K; % % the following is the shortcut step to calcualte the eigen value "squared frequency values" and the % corresponding eigen vector "the mode shape" [eigvect, eigval] = eig(A); eigenvals = diag(eigval) % the natural frequencies and the corresponding mode shape omega1 = sqrt(eigenvals(1)) % the corresponding mode shape mode_shape1 = eigvect(:,1) %============================================================== omega2 = sqrt(eigenvals(2)) % the corresponding mode shape mode_shape2 = eigvect(:,2) Dr. Mohamed Mostafa
Eigen Value and Eigen Vector Problems Example: For a two degree of freedom system, the following mass and stiffness matrices are listed down. Find the Eigen-values, natural frequencies, and the corresponding Eigen-vectors “mode shapes” MatLab Program eigenvals = 3.1358 10.3642 omega1 = 1.7708 mode_shape1 =[-0.8083; 0.5888] omega2 = 3.2193 mode_shape2 =[-0.0726; -0.9974] Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa
Example 7 Rao 5th Edition Dr. Mohamed Mostafa