Download
1 / 16
160 likes | 319 Views
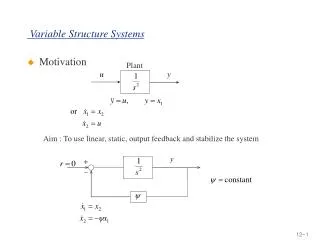
Neuron PID Variable Structure Control. Introduction.

E N D
Introduction • With the developments of industrial production, the requirements to automatic control are getting higher and higher. Uncertainties are widely existed in practical processes, such as paper-making, oil refining process etc. In which there are many production situations. and under each situation, the plant will behave different model. Therefore, the difficult problem we face is that how to design a controller to meet the needs of controlling a multi-model plant.
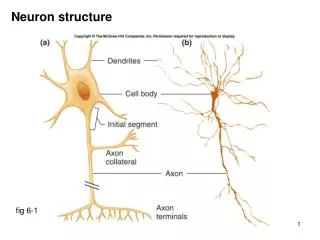
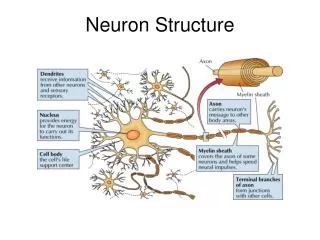
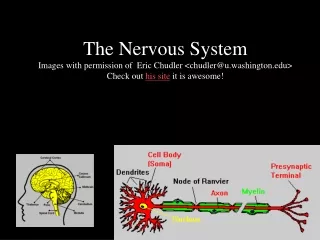
The Neuron Model and LearningStrategy for Control • (1) Hebbian learning • (2) Supervised learning • (3) Associative learning
Hebbian learning • It expresses that an adaptive neuron depending on itsadaptability makes actions and reflections to theunknown surroundings.
Supervised learning • It expresses that an adaptive neuron, which does forced learning under supervising of the teacher’s signal z(t), makes actions and reflections to the unknown surroundings.
Associative learning • It expresses that an adaptive neuron, which uses the learning way integrating Hebbien learning and Supervised learning, makes actions and reflections to the unknown outsides with the associative search.
The Neuron PID Variable StructureControl Systems • A. The incremental neuron control method • B. Incremental PID control • C. The neuron PID variable structure control method
The incremental neuron control method • According to the neuron model and its learning strategy described as above, the incremental neuron model-free control method is presented as follows.
Incremental PID control • It is known that the incremental PID control algorithm is written as
The neuron PID variable structure control method • The neuron PID variable control systems
The neuron PID variable structure control method is proposed as follows
Simulation Tests and Results • The basic neuron control result
Conclusions • The main advantages of the new model-free control method have strong adaptability and robustness. It shows good performances of the control system under various conditions. To the multi-model plant, the controller keeps satisfied dynamics of the control system. This new controller is very simple. It is not strict to select the controller parameters. Therefore, it is easy to use it in practice.
References • [1] Wang Ning, J. Tu and J. Chen. Intelligent control using a single adaptive neuron, Proceedings of the third national congress of Chinese Association of Automation, Beijing, pp. 173-177, 1991 • [2] Wang Ning, J.Tu and J. Chen, Neuron intelligence control for electroslagremelting processes, ACTA Automatica SINICA, vol. 19. no.5, pp. 634-636, 1993 • [3] Wang Qingguo, et al, A multi-model design method for multivariable control systems with uncertainties and its application in basis weight control, ACTA AutomaticaSlNICA, vol. 17, no. 1, pp. 68-76,1991